Normas de precisión LiDAR: Lo que demuestran las pruebas de la industria

La precisión LiDAR es el alma de la adquisición fiable de datos espaciales. El concepto básico muestra lo cerca que está una medición LiDAR del valor real. Cuando los profesionales hablan de precisión LiDAR, la expresan como rango (±2 cm) o como desviación estándar (3 cm a 1σ).
El ámbito LiDAR tiene dos clasificaciones principales de precisión: precisión relativa y absoluta. La precisión relativa muestra la precisión de las mediciones comparadas entre sí dentro del mismo conjunto de datos. Responde a la pregunta «¿Cuál es la precisión de las mediciones entre sí?». Esta precisión interna establece niveles de confianza al comparar puntos dentro de una nube de puntos, sea cual sea su posición exacta en la Tierra. La precisión absoluta mide cómo coinciden los datos LiDAR con las ubicaciones geográficas reales en la superficie de la Tierra. Responde a una pregunta sencilla: «¿Cómo de cerca están mis mediciones de los valores verdaderos?».
La comparación estadística entre los puntos conocidos (medidos) y los puntos láser medidos determina la precisión LiDAR. La desviación estándar y el error cuadrático medio (RMSE) son medidas estadísticas habituales en el sector. La diferencia entre los puntos de control terrestre y las elevaciones LiDAR ayuda a evaluar la precisión vertical, que suele oscilar entre 5 y 30 centímetros.
Estos factores afectan a la precisión del LiDAR:
- Componentes de hardware – cada uno con sus propios valores de precisión expresados como distancia o ángulo
- Errores sistemáticos por descalibrado o sesgo de la brújula
- Errores aleatorios/ruido en las mediciones
- Condiciones ambientales que afectan a la calidad de la señal
- Algoritmos de procesamiento y métodos de filtrado
Una fórmula simplificada calcula la precisión global de un sistema LiDAR:
Precisión global = √[(error GNSS)² + (error de alcance LiDAR)² + (alcance * tan(error INS))² + (alcance * tan(error LiDAR – INS))²].
La precisión disminuye a medida que aumenta la distancia al sensor, debido al error angular del INS. Esto hace que sea importante comprender el rango del que procede una cifra de precisión declarada. Los usuarios pueden obtener precisiones verticales superiores a 15 cm a 1.200 m de altitud en condiciones óptimas.
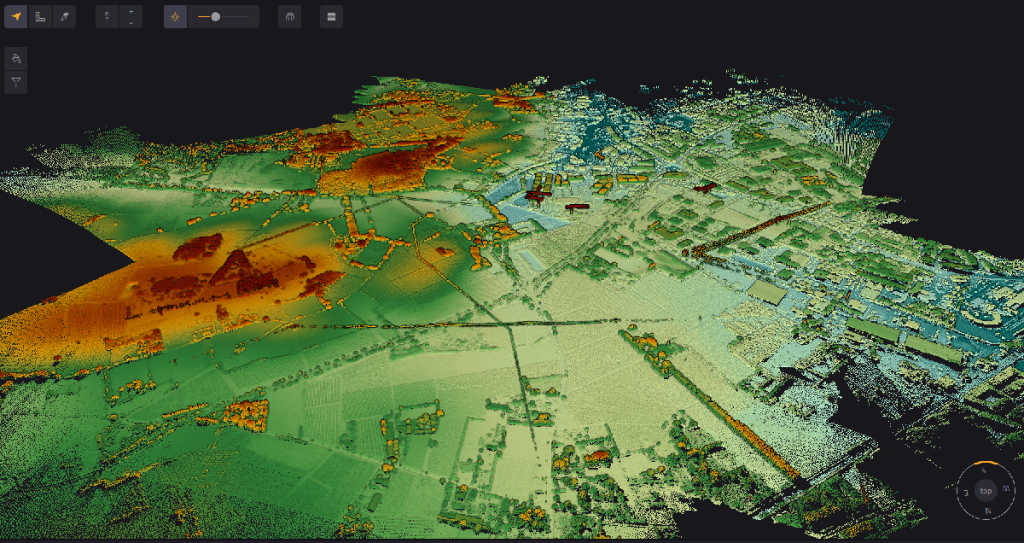
Nube de puntos generada en YellowScan CloudStation
Normas de precisión LiDAR reconocidas por la industria
Las normas que tienen 10 años forman la base para garantizar la precisión LiDAR en industrias de todo tipo. Estos marcos proporcionan métodos coherentes para medir, informar y demostrar correctamente la calidad de los datos espaciales.
Sistema de clasificación de precisión ASPRS
La Sociedad Americana de Fotogrametría y Teledetección (ASPRS) proporciona las normas más completas y accesibles para evaluar la precisión LiDAR. Las Normas de Precisión Posicional para Datos Geoespaciales Digitales de la ASPRS, Edición 2, fueron aprobadas en agosto de 2023. Esta edición actualiza la primera versión de 2014, que marcó el camino en las directrices sobre cartografía digital.
La norma revisada aporta varias mejoras clave:
- No más referencias de nivel de confianza del 95% como medidas de precisión
- Los requisitos de precisión del objetivo para los puntos de control terrestre ahora necesitan el doble de precisión en lugar del cuádruple
- Los puntos de control mínimos aumentaron de 20 a 30 para evaluar la precisión
La Edición 2 expresa ahora la precisión horizontal como RMSEH (error lineal combinado en la dirección radial) en lugar de valores separados de RMSEx y RMSEy. La norma exige distribuciones específicas de puntos de control con al menos 30 puntos de control repartidos uniformemente por las áreas del proyecto.
Normas ISO para la precisión de los datos geoespaciales
La Organización Internacional de Normalización (ISO) se ocupa de la precisión LiDAR a través de su serie ISO/TS 19159. La ISO/TS 19159-2 cubre específicamente «el método de captura de datos, las relaciones entre los sistemas de referencia de coordenadas y sus parámetros, así como la calibración de los sensores LiDAR aerotransportados». Esta guía técnica normaliza los procesos de calibración desde el punto de vista geométrico, radiométrico y característico para aplicaciones en diversas áreas como la tierra, el hielo, los bosques, el agua y la atmósfera.
Normas del Comité Federal de Datos Geográficos (FGDC)
El FGDC creó la Norma Nacional de Precisión de los Datos Espaciales (NSSDA). Esta norma utiliza el error cuadrático medio (RMSE) para estimar la precisión posicional de los datos geoespaciales. Las pruebas requieren una fuente independiente de mayor precisión y al menos 20 puntos de comprobación distribuidos por el área geográfica.
La Ley de Datos Geoespaciales de 2018 convirtió al FGDC en la organización principal para desarrollar normas de datos geoespaciales. Las agencias federales deben cumplir estas normas cuando recojan o produzcan datos geoespaciales. Se anima a los organismos no federales a adoptar estas normas para facilitar el intercambio de datos.
Datos geoespaciales digitales basados en la posición de la Tierra
Cómo se comprueba y verifica la precisión del LiDAR
Los sistemas LiDAR necesitan métodos de prueba rigurosos que demuestren que son correctos tanto para las mediciones de precisión relativa como absoluta. Una imagen completa te dará la seguridad de que los datos recogidos cumplen las especificaciones del proyecto y las normas del sector antes de utilizarlos en aplicaciones críticas.
Métodos de verificación de los puntos de control terrestre
Los Puntos de Control del Terreno (PCT) funcionan como marcadores de referencia con coordenadas conocidas para demostrar la precisión de los datos LiDAR. Estos puntos funcionan como puntos de enlace en el software de procesamiento. Informan a la nube de puntos sobre la escala y la orientación, y ayudan a mejorar la calidad general de los datos. Para que funcionen, los GCP deben asentarse sobre terreno abierto llano o con pendiente uniforme, con una inclinación del 10% o menos. Debes evitar los artefactos verticales o los cambios bruscos de elevación.
La topografía cinemática en tiempo real (RTK ) ofrece la forma más rápida de recoger los GCP. Esta técnica necesita dos receptores GNSS: una estación de referencia estática (base) y un receptor móvil (rover). La base envía datos de corrección al vehículo móvil y proporciona una precisión centimétrica -normalmente de 1 a 3 cm- al establecer las ubicaciones de los puntos de referencia geográficos.
Los topógrafos deben distinguir dos tipos de puntos de control: Los Puntos de Control Terrestre (PCT) para los ajustes de datos y los Puntos de Control Topográfico (PCT) sólo para los informes de precisión. Los puntos de control nunca cambian la forma en que se procesa el levantamiento, lo que les ayuda a mantenerse independientes para la validación.
Técnicas de evaluación de la precisión relativa
La precisión relativa, también llamada «precisión de franja a franja» o «coherencia entre franjas», muestra hasta qué punto coinciden entre sí las áreas de recogida de datos que se solapan. Esta comprobación interna de la calidad geométrica examina principalmente las diferencias verticales entre las trayectorias de vuelo solapadas.
El proceso de evaluación utiliza varios métodos:
- Comparación basada en superficies: Las superficies terrestres proceden de algoritmos punto a digital (PTD) a nivel de cada línea de vuelo. Cada superficie se compara con puntos clasificados en tierra de todas las líneas de vuelo solapadas. Las diferencias se registran y resumen.
- Análisis estadístico: Tienes que comprobar la consistencia del solapamiento en varios puntos dentro de las zonas sin vegetación. Estas zonas sólo deben tener retornos únicos y pendientes inferiores a 10 grados. Un archivo shapefile de polígonos muestra la consistencia de la superposición a través de las áreas de muestra. El archivo incluye atributos como los valores de diferencia mínima, diferencia máxima y RMSDz.
Protocolos de medición de precisión absoluta
Las pruebas de precisión absoluta comparan las mediciones LiDAR con puntos topográficos independientes de mayor precisión. El equipo compara elevaciones del conjunto de datos LiDAR con elevaciones de puntos de control en coordenadas x/y similares para evaluar la precisión vertical.
Las normas ASPRS dicen que las pruebas de precisión necesitan al menos 20 puntos de control, aunque las normas más recientes sugieren 30. Las áreas de menos de 500 kilómetros cuadrados necesitan al menos 20 puntos de control de Precisión Vertical No Vegetada (NVA) y 5 de Precisión Vertical Vegetada (VVA).
La evaluación de la precisión horizontal compara coordenadas planimétricas de puntos bien definidos con coordenadas de fuentes de mayor precisión. A pesar de ello, los puntos de control topográficos no funcionan bien para estimar la precisión horizontal absoluta en los datos de elevación derivados de LiDAR. La naturaleza dispersa de los datos de la nube de puntos en comparación con las imágenes de alta resolución provoca esta limitación.
Validación cruzada con sistemas de medición alternativos
La comprobación de los datos LiDAR con otras tecnologías de medición aumenta la confianza en las evaluaciones de precisión. Las estaciones totales lideran la validación porque ofrecen mayor precisión que los métodos GPS. La precisión del GPS depende de las distancias del punto base, el tiempo de observación y la geometría del satélite.
Programas como CloudCompare ayudan a comparar nubes de puntos de distintos métodos. Un estudio analizó GPC de LiDAR del USGS frente a mediciones de estaciones totales. Los resultados mostraron diferencias medias en 2D (X,Y) de 2,2 pulgadas y diferencias medias en 3D (X,Y,Z) de 5,9 pulgadas.
La validación cruzada con fotogrametría funciona procesando las mismas imágenes con diferentes fuentes de GCP. El proceso se alinea utilizando herramientas de pares de puntos equivalentes y ajusta sólo los parámetros de traslación y guiñada para comprobar las diferencias de elevación. Este método ayuda a verificar la precisión sin necesidad de mucho equipo de campo ni visitas al lugar.
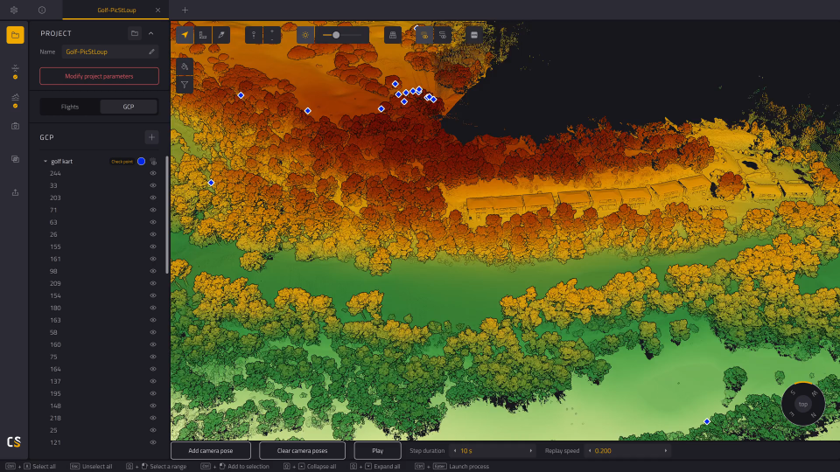
Parámetros del GCP de Cloudstation
Factores clave que afectan a la precisión del escáner LiDAR
La precisión de los sistemas LiDAR depende de complejas interacciones entre múltiples variables técnicas y medioambientales. Los profesionales deben comprender estas influencias para lograr una mayor precisión en condiciones reales.
Especificaciones y limitaciones del hardware
La calidad de los componentes del sensor afecta a la precisión de las mediciones. Los sensores LiDAR de gama alta ofrecen mayor precisión que los de calidad inferior. El sistema necesita una calibración adecuada para obtener datos fiables. Los pequeños errores de calibración pueden extenderse por toda la nube de puntos y reducir la precisión global.
Los datos GNSS e IMU imprecisos afectan directamente a la georreferenciación de la nube de puntos final. La actitud de vuelo (balanceo, cabeceo y rumbo) de los sistemas aerotransportados crea errores cuando los sensores giran inesperadamente durante la recogida. La altura de vuelo no afecta directamente a la precisión, pero cambia la densidad de puntos, lo que afecta a la precisión en terrenos complejos.
Condiciones ambientales y atmosféricas
Las condiciones meteorológicas plantean grandes retos a las operaciones LiDAR. Las señales láser se dispersan o son absorbidas por la lluvia, la niebla y las partículas de polvo, lo que provoca mediciones deficientes. Las mediciones del alcance se mantienen estables incluso durante fuertes lluvias, con cambios normalmente inferiores a 20 centímetros. La lluvia reduce tanto la intensidad de retorno como los puntos detectados, especialmente en superficies pavimentadas.
Los cambios en la densidad del aire debidos a la humedad afectan a la calibración del sensor. Las temperaturas extremas modifican tanto el funcionamiento del dron como el rendimiento del sensor. Los sistemas se enfrentan a problemas derivados de la luz solar directa debido a su intensidad y al solapamiento de longitudes de onda.
Algoritmos de tratamiento de datos y filtrado
Los algoritmos avanzados de filtrado mejoran la precisión limpiando las nubes de puntos brutas de ruido, valores atípicos y puntos no deseados. El refinamiento de los datos utiliza distintos enfoques, como los Filtros de Cuadrícula de Vóxeles, la Eliminación Estadística de Valores Atípicos y la Eliminación de Valores Atípicos de Radio.
Las zonas con elevaciones variadas dificultan el filtrado del suelo, porque los algoritmos no distinguen fácilmente los puntos del suelo de los que no lo son. Los métodos simples de filtrado del ruido no separan bien los elementos estáticos del fondo de los objetos dinámicos. Los Filtros Kalman y los enfoques de aprendizaje automático ayudan a mejorar la precisión de la clasificación para resolver estos problemas.
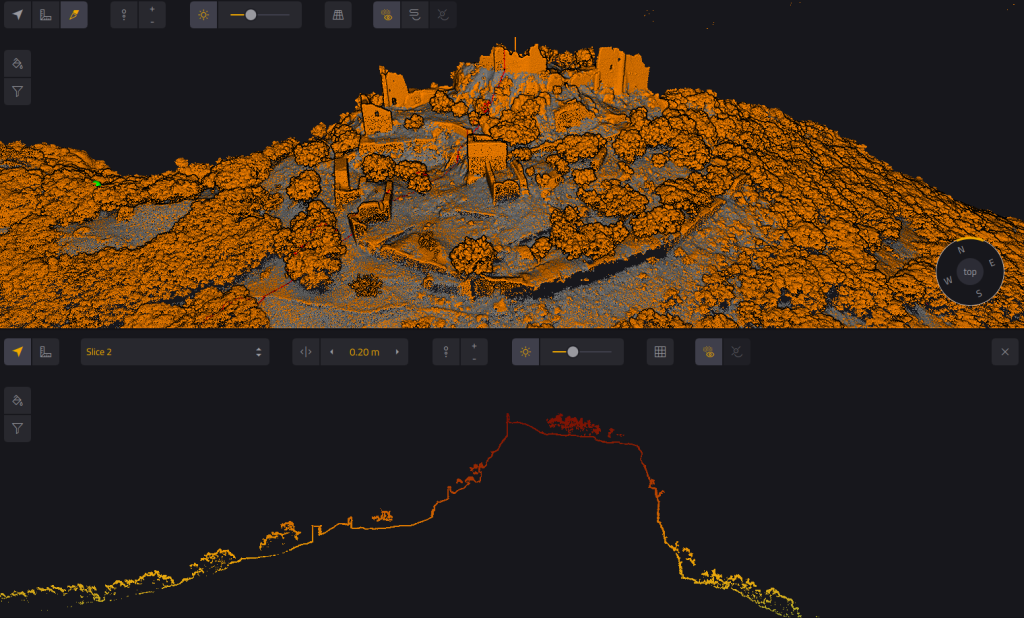
Rebanada del Castillo de Montferrand en el software YellowScan CloudStation
Problemas habituales de precisión LiDAR y soluciones
Los despliegues LiDAR funcionan mejor cuando los equipos reconocen y solucionan los problemas específicos de precisión que pueden afectar a la calidad de los datos. La tecnología ha avanzado, pero aún existen algunas limitaciones básicas. Los equipos deben abordarlas mediante una calibración cuidadosa y técnicas de procesamiento.
Errores sistemáticos y problemas de calibración
Los errores sistemáticos suponen un gran reto en los sistemas LiDAR. Estas desviaciones de medición predecibles afectan a la precisión. Los errores se manifiestan principalmente por la desalineación del punto de mira, es decir, el desfase angular entre el sensor LiDAR y el sistema de coordenadas GPS/INS de a bordo. Esta desalineación crea el mayor error sistemático en las operaciones UAV-LiDAR. La altitud de vuelo y el ángulo de exploración empeoran aún más sus efectos.
La miscalibración afecta a la reconstrucción de nubes de puntos de dos formas fundamentales en los sistemas aéreos. Los errores de puntería crean huecos entre las líneas de vuelo superpuestas, lo que da lugar a valores de elevación incoherentes para ubicaciones similares en el suelo. Estos errores también crean distorsiones que crecen a medida que aumenta la distancia desde el sensor.
Los equipos utilizan dos enfoques principales para una calibración eficaz:
- La calibración intrínseca trabaja sobre los parámetros internos del sensor LiDAR, incluida la alineación del haz láser, utilizando objetivos de calibración de dimensiones conocidas.
- La calibración extrínseca empareja el LiDAR con otros sensores, como cámaras o radares, para garantizar una fusión de datos precisa.
Los estudios demuestran que unas técnicas de calibración adecuadas pueden reducir mucho los errores de reproyección, rotación y distancia. Sí, es habitual que los especialistas utilicen software de alineación de bandas. Esto ayuda a corregir los errores sistemáticos sobrantes ajustando la posición y los ángulos a lo largo de la misión.
Errores aleatorios y estrategias de reducción del ruido
Los errores aleatorios difieren de los sistemáticos. Provienen de fluctuaciones impredecibles en los procesos de medición. Las fuentes principales son el ruido cuántico (ruido de disparo) de la naturaleza discreta de la luz, el ruido térmico del movimiento aleatorio de los electrones y el exceso de ruido de los tubos fotomultiplicadores durante la detección analógica.
El ruido de las nubes de puntos revela errores aleatorios. Puedes verlo al observar los valores medios de pendiente de LiDAR de resolución completa. Estos valores parecen inusualmente altos incluso en terreno llano. Esto ocurre porque la precisión vertical (normalmente 12-15 centímetros) crea diferencias de altura aleatorias entre puntos cercanos de 24-30 centímetros. Los puntos separados sólo 1 metro horizontalmente crean lo que los expertos en procesamiento de señales llaman «ruido de alta frecuencia».
Los equipos pueden reducir el ruido mediante:
- Filtrado estadístico para detectar y eliminar valores atípicos basándose en patrones de distribución espacial
- Filtrado de tamaño de ventana para aumentar la relación entre la densidad de muestras horizontales y la precisión vertical
- Método NSF (factor de escala de ruido) para estimar el error aleatorio sin efectos de variabilidad atmosférica
Degradación de la precisión en entornos difíciles
Las condiciones de la vida real afectan al rendimiento del LiDAR por diversos factores ambientales. La lluvia, la niebla y el polvo dispersan o absorben los rayos láser, lo que da lugar a datos incompletos o erróneos. La niebla afecta a la precisión debido a la dispersión de partículas de agua. La lluvia modifica tanto la intensidad de la señal como la densidad de puntos.
Las superficies reflectantes plantean retos especiales a los sistemas LiDAR. Los haces de luz se distorsionan por los objetos espejados y las paredes de cristal, lo que imposibilita la medición precisa de distancias. Estas distorsiones provocan errores en la localización y el mapeo simultáneos (SLAM). Esto aumenta los riesgos de accidente en las aplicaciones de vehículos autónomos.
Los especialistas utilizan varias estrategias para aumentar el rendimiento en condiciones difíciles:
- Algoritmos adaptativos que se ajustan a las interferencias del entorno en tiempo real
- Fusión de múltiples sensores que combina LiDAR con cámaras, radar y GPS
- Técnicas avanzadas de filtrado, como la Eliminación de Valores Atípicos de Baja Intensidad (LIOR) y la Eliminación Dinámica de Valores Atípicos de Distancia e Intensidad (DDIOR)

YellowScan LiDAR montado en un dron de ala fija, escaneando por encima de un mar de nubes.
El futuro de las normas de precisión LiDAR
Las normas de precisión LiDAR siguen progresando con los avances tecnológicos y la expansión de las aplicaciones. La Sociedad Americana de Fotogrametría y Teledetección (ASPRS) ha publicado su segunda edición de las Normas de Precisión Posicional para Datos Geoespaciales Digitales, que aporta los cambios más importantes respecto a los marcos anteriores. Estos cambios incluyen el cambio de nombre de los términos RMSE: RMSEz se convierte en RMSEV y RMSEx/RMSEy se combinan en RMSEH. La nueva norma ya no hace referencia al nivel de confianza del 95% como medida de precisión y tiene requisitos menos estrictos para los puntos de control terrestre.
Los últimos avances tecnológicos han dado lugar a mejoras sin precedentes en la precisión. Los sistemas LiDAR Doppler coherentes ofrecen ahora precisiones de medición mejores que 0,8 centímetros por segundo para la velocidad y 0,8 metros para el alcance. La próxima generación de sensores alcanzará una precisión de centímetros a mayores distancias, lo que mejorará las aplicaciones en topografía, construcción y navegación autónoma.
El LiDAR de estado sólido aporta un cambio fundamental hacia una mayor fiabilidad al eliminar las piezas móviles. Este avance hace que los sistemas sean más duraderos y mejora las capacidades de mapeo 3D en la vida real. Varios fabricantes han anunciado tecnologías que alcanzan una precisión del 99,9% en el seguimiento de objetos y del 98,9% en el reconocimiento de objetos utilizando sólo LiDAR.
La integración de la IA reconfigura lo que el LiDAR puede conseguir en términos de precisión. Los algoritmos basados en IA automatizan el reconocimiento de objetos, mejoran el filtrado de nubes de puntos y optimizan la toma de decisiones al minuto. Estas mejoras ayudan a los sistemas a manejar mejor condiciones meteorológicas difíciles, como la lluvia y la niebla, y una solución duplicó la distancia detectable de 20 m a 40 m en caso de fuertes lluvias.
Es probable que las normas futuras incluyan capacidades LiDAR multiespectrales, ya que estos sistemas captan datos a través de múltiples longitudes de onda para clasificar mejor los materiales. Los sistemas de alta precisión están empezando a estar disponibles en diversos sectores gracias a las tendencias de miniaturización.
La precisión de los futuros sistemas LiDAR seguirá dependiendo de los parámetros de calibración, la densidad de puntos, los parámetros de vuelo y las técnicas de procesamiento de datos. La investigación se centra ahora en mejorar el alcance, la resolución, la ejecución en tiempo real, la eficiencia energética y una mayor integración de la IA.
Preguntas frecuentes
¿Cómo se evalúa normalmente la precisión LiDAR?
La precisión del LiDAR suele evaluarse utilizando puntos de control terrestre (PCT) con coordenadas conocidas. Los topógrafos comparan las mediciones LiDAR con estos puntos medidos de forma independiente, lo que suele requerir un mínimo de 20-30 puntos de control distribuidos por el área del proyecto. Para cuantificar la precisión se utilizan medidas estadísticas como el error cuadrático medio (RMSE).
¿Qué precisión de alcance pueden alcanzar los sistemas LiDAR modernos?
Los sistemas LiDAR modernos pueden alcanzar una precisión de alcance impresionante. Los sensores de gama alta pueden alcanzar precisiones de 0,5 a 10 mm en relación con el sensor, con precisiones cartográficas de hasta 1 cm en horizontal y 2 cm en vertical. Algunos sistemas avanzados se aproximan incluso a la precisión centimétrica a distancias mayores.
¿Cuáles son los formatos de archivo estándar del sector para el almacenamiento de datos LiDAR?
Los formatos de archivo LAS (LASer) y LAZ (LAS comprimido) están ampliamente reconocidos como estándares del sector para almacenar y compartir datos LiDAR. Estos formatos vectoriales almacenan eficazmente los datos de nubes de puntos y son compatibles con numerosas herramientas de software, lo que los hace esenciales para la interoperabilidad en las industrias topográfica y cartográfica.
¿Cómo afectan los factores medioambientales a la precisión del LiDAR?
Las condiciones ambientales afectan significativamente al rendimiento del LiDAR. Factores como la lluvia, la niebla, el polvo y las temperaturas extremas pueden dispersar o absorber las señales láser, degradando la precisión de las mediciones. Por ejemplo, las fuertes lluvias pueden reducir la intensidad de los retornos y el número de puntos detectados, sobre todo al escanear superficies como el pavimento.
¿Qué papel desempeña la IA en la mejora de la precisión LiDAR?
La Inteligencia Artificial está mejorando cada vez más las capacidades de precisión LiDAR. Los algoritmos basados en IA automatizan el reconocimiento de objetos, mejoran el filtrado de nubes de puntos y optimizan la toma de decisiones en tiempo real. Estos avances permiten a los sistemas compensar las difíciles condiciones ambientales, y algunas soluciones duplican las distancias detectables en condiciones meteorológicas adversas, como lluvias torrenciales.