Cómo afecta realmente el tiempo al rendimiento del LiDAR

Hero Image for Cómo afecta realmente el tiempo al rendimiento de los LiDAR La tecnología LiDAR emplea la luz para medir distancias con notable precisión. Abreviatura de
El principio del LiDAR sigue siendo sencillo: calcular la distancia basándose en la medición del tiempo de vuelo. Este cálculo se basa en una fórmula sencilla Distancia = (Velocidad de la luz × Tiempo de vuelo) ÷ 2. El sistema realiza este cálculo millones de veces por segundo y crea densas «nubes de puntos» que captan intrincados detalles del entorno.
Un sistema LiDAR completo tiene cuatro componentes clave que funcionan juntos a la perfección. La fuente láser crea pulsos de energía, normalmente del espectro infrarrojo cercano para aplicaciones terrestres y de longitudes de onda azul-verde para cartografía submarina. El escáner guía estos haces láser a través de espejos giratorios u oscilantes por la zona objetivo. El detector capta la luz reflejada y la convierte en señales eléctricas. La unidad de procesamiento convierte estas señales en datos posicionales utilizables.
Los sistemas LiDAR actuales alcanzan velocidades extraordinarias. Emiten de decenas a cientos de miles de impulsos por segundo. Los sistemas más avanzados alcanzan ahora de
Las aplicaciones móviles, como los vehículos autónomos o las aeronaves, necesitan componentes de posicionamiento adicionales. El Sistema de Posicionamiento Global (GPS) rastrea la ubicación exacta del escáner. La Unidad de Medición Inercial (IMU) controla la orientación del sistema mediante acelerómetros, giroscopios y magnetómetros. Estos componentes trabajan juntos para permitir la georreferenciación directa de los puntos recogidos.
El LiDAR se distingue de las tecnologías de detección pasiva porque crea su propia energía luminosa. Esta característica única permite que el LiDAR funcione de noche, cuando las condiciones atmosféricas suelen mejorar. Sin embargo, el sistema no puede penetrar las nubes, la lluvia o la niebla densa, y necesita buen tiempo para funcionar de forma óptima. Estas limitaciones meteorológicas merecen una mayor atención para comprender sus efectos específicos.
Cómo afecta la lluvia a la capacidad de detección LiDAR
La lluvia afecta mucho al rendimiento del LiDAR a través de múltiples mecanismos físicos. ¿Se ve afectado el LiDAR por las condiciones meteorológicas? La respuesta es definitivamente sí, sobre todo cuando hay condiciones de lluvia en las que tanto las propiedades ópticas como las físicas crean retos complejos para los sistemas de detección autónomos.
La física de la interacción de la luz con las gotas de lluvia
Los sistemas LiDAR se enfrentan a dos tipos principales de interferencias de la lluvia. Las gotas de lluvia bloquean directamente los haces láser y hacen que se dispersen, refracten o reflejen demasiado pronto. Así, la luz láser se desvía de su trayectoria prevista, lo que impide que los haces rectos alcancen sus objetivos. Además, pierde intensidad de señal cuando las gotas de lluvia absorben parte de la energía luminosa.
Las cosas se complican con el coeficiente de extinción, una medida que depende de la intensidad de la lluvia, la distribución del tamaño de las gotas y los efectos de la dispersión. Las gotas de lluvia que se adhieren a la superficie exterior del sensor causan problemas aún mayores. Estas gotas de agua funcionan como diminutas lentes que cambian drásticamente las trayectorias ópticas y distorsionan la nube de puntos resultante. Las investigaciones demuestran que incluso gotas diminutas en las superficies de los sensores pueden bloquear completamente las señales en las zonas afectadas.
Reducción del alcance de detección en diferentes intensidades de lluvia
La capacidad de detección disminuye a medida que aumenta la lluvia. Los estudios muestran una
Las pruebas en el mundo real demuestran que el LiDAR no puede detectar en absoluto las señales de tráfico estándar cuando los niveles de precipitación alcanzan los 40 mm/h o más, sean cuales sean las propiedades del material reflectante. Las mediciones de alcance tampoco son fiables, con diferencias de hasta 20 cm en caso de lluvia intensa.
Retos del procesamiento de señales en condiciones de lluvia
La lluvia crea dos problemas principales en el procesamiento de señales: falsos positivos y falsos negativos. Las gotas de lluvia suelen engañar al sistema para que vea objetos que no existen a distancias cortas de hasta 50 m. Este efecto es menos frecuente a distancias medias entre 50 y 100 m, pero el sistema empeora en la detección de objetos reales a medida que aumenta la lluvia.
Los algoritmos de procesamiento de señales se enfrentan a duros retos con los datos afectados por la lluvia, que cambian constantemente. Aparecen errores aleatorios en la nube de puntos, sobre todo porque las gotas de agua adheridas a las superficies del sensor bloquean las señales de forma desigual. El material de la cubierta del sensor marca una gran diferencia: las superficies hidrófilas crean patrones de distorsión distintos de las hidrófobas.
Rendimiento del LiDAR en entornos de niebla y nieve
Fuente de la imagen: Ottawa Business Journal
La niebla y la nieve crean retos únicos para la tecnología LiDAR que difieren de los problemas relacionados con la lluvia. Estas condiciones meteorológicas afectan a la capacidad de detección mediante mecanismos físicos específicos que requieren soluciones especiales.
Por qué la niebla afecta al LiDAR de forma diferente a las cámaras
El LiDAR muestra unas capacidades sorprendentes, mientras que las cámaras tienen grandes dificultades en condiciones de niebla. Las investigaciones demuestran que el LiDAR puede «ver» mejor y más lejos en la niebla que las cámaras o los ojos humanos. Esta inesperada ventaja se debe a cómo se propaga la luz.
Las diminutas moléculas de agua dispersan la luz por todas partes cuando se forma niebla. La visibilidad de las cámaras se reduce a un 50% de su alcance normal en la niebla. La energía láser focalizada del LiDAR atraviesa mejor la niebla moderada porque tiene siete veces más densidad de potencia óptica que la luz visible a 100 metros.
La niebla provoca principalmente difusión, mientras que la lluvia provoca dispersión. Las pruebas reales demuestran esta diferencia. El LiDAR sigue proporcionando datos fiables para vehículos con niebla de leve a moderada, incluso cuando las cámaras no consiguen detectar objetos a 50 metros.
Partículas de nieve: retos únicos para la detección láser
La nieve crea mayores obstáculos para el LiDAR que la niebla. Las partículas de nieve son mayores que las diminutas gotas de agua de la niebla y rebotan más los haces láser. Los sistemas LiDAR no funcionan tan bien en la nieve como en la niebla debido a esta diferencia de tamaño.
Las partículas de nieve complican la detección. Los copos de nieve crean falsos retornos a diferentes distancias de los objetivos reales. El bloqueo y la reflexión del haz provocan estos falsos retornos, que los investigadores denominan «oclusión meteorológica».
Los algoritmos estándar de agrupación espacial basados en la densidad muestran muchas detecciones falsas en condiciones de nieve. Los investigadores han descubierto que la nieve crea patrones distintos en los datos de nubes de puntos con alta densidad, baja intensidad, corto alcance y rápido decaimiento.
Problemas de acumulación de hielo en el hardware del sensor
La formación de hielo en las superficies de los sensores puede ser el mayor problema. El hielo se acumula en las carcasas de los sensores y en las superficies de los objetivos cuando hace frío, y altera sus propiedades reflectantes naturales. Esta acumulación debilita las señales láser devueltas y reduce la densidad de la nube de puntos.
Las pruebas de campo demuestran que las capas de hielo afectan mucho tanto a la intensidad como a la densidad de los retornos LiDAR. Los distintos materiales degradan las señales a distintos ritmos. Los equipos deben limpiar los sensores con frecuencia durante las pruebas porque «la rápida acumulación de hielo ha provocado a menudo breves segmentos de recogida de datos seguidos de una limpieza manual».
La mayoría de los objetivos muestran menor intensidad con la acumulación de hielo, pero los reflectores de radar en realidad se vuelven más brillantes. Esto demuestra cómo las superficies heladas afectan a distintos materiales de formas complejas.
Efectos de la temperatura y la humedad en la precisión del LiDAR
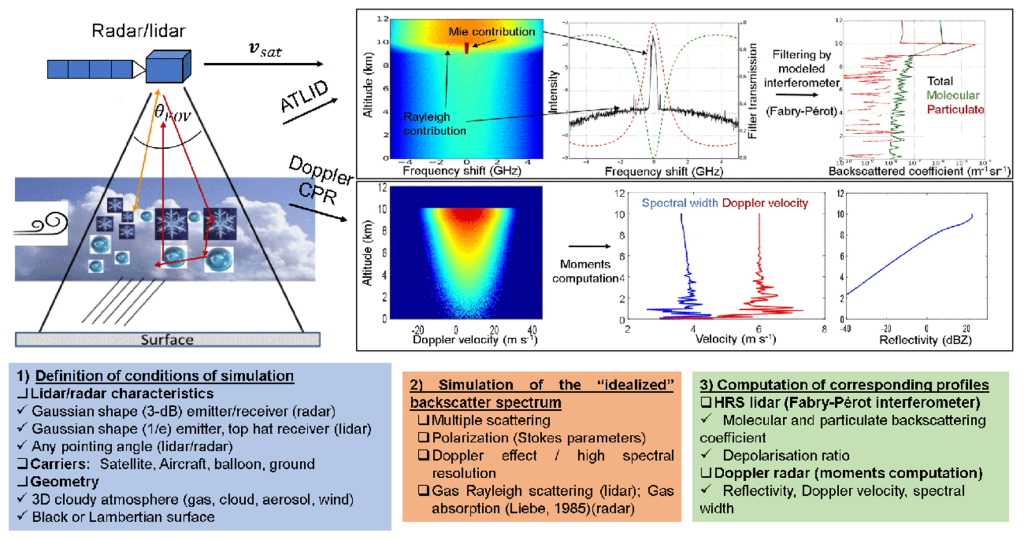
Fuente de la imagen: AMT – Reciente – Copernicus.org
Los cambios de temperatura y los niveles de humedad crean retos únicos para los sistemas LiDAR que necesitan soluciones de ingeniería cuidadosas. Estos factores ambientales modifican el funcionamiento de los componentes de los sensores a nivel molecular. Esto afecta a su rendimiento y hace que las mediciones sean menos precisas.
Dilatación y contracción térmica de los componentes
Los sistemas LiDAR funcionan mal a temperaturas inferiores a -10 °C. El bajo rendimiento no se debe sólo a la congelación mecánica de las piezas giratorias, sino a cambios básicos en la forma de iluminar del láser. Las bajas temperaturas pueden reducir a la mitad el número de ecos del láser. Esto es un gran problema, ya que significa que el alcance de detección disminuye y el reconocimiento de patrones se vuelve poco fiable.
La ciencia que hay detrás de esto está relacionada principalmente con los materiales semiconductores de los sensores de fotodiodo de avalancha (APD). Las temperaturas más altas hacen que más electrones salten de la banda de valencia a la banda de conducción. Esto provoca un aumento del flujo de corriente inversa. Este comportamiento dependiente de la temperatura afecta a múltiples parámetros críticos:
- La corriente oscura aumenta al subir la temperatura porque se forman más pares electrón-hueco de forma natural
- Las condiciones más cálidas reducen la ganancia a tensiones fijas, ya que los electrones tienen caminos libres medios más cortos
- Las temperaturas más altas necesitan tensiones de funcionamiento más altas para mantener el rendimiento constante
Los sensores LiDAR de los coches deben funcionar de forma fiable entre -40 °C y 125 °C. Estas temperaturas extremas hacen que la dilatación y contracción térmica de los materiales de los bancos ópticos sea un verdadero problema. El aluminio se dilata y contrae 1,7 veces más que el acero cuando cambian las temperaturas.
Formación y prevención de la condensación
La humedad crea problemas por la condensación en las ventanas de los sensores. Esto afecta directamente a cómo viaja la luz y cómo se detecta. El vapor de agua del tubo de escape de los coches cuando hace frío crea lecturas falsas, como objetos fantasma. Esto plantea graves riesgos para los sistemas de autoconducción.
A diferencia de los sistemas de cámara con aberturas pequeñas, en los que una sola gota de agua puede bloquear grandes porciones del campo de visión, el LiDAR utiliza aberturas ópticas mayores que ayudan a reducir algunos efectos de la humedad. Aun así, debes evitar la condensación para que el sistema funcione correctamente.
Las neveras termoeléctricas ofrecen una gran solución para mantener las temperaturas estables sin piezas móviles. Estos sistemas de refrigeración activa mantienen las temperaturas de funcionamiento en su punto justo. Esto detiene la deriva de la longitud de onda y mantiene la precisión de las mediciones.
Soluciones actuales a las limitaciones del LiDAR relacionadas con la meteorología
Científicos e ingenieros han creado varias soluciones para hacer frente al LiDAR afectado por problemas meteorológicos. Estos nuevos desarrollos abordan los retos básicos que la lluvia, la nieve y los cambios de temperatura crean para los sistemas de detección autónomos.
Algoritmos avanzados de tratamiento de señales
Los enfoques algorítmicos lideran la reducción de los problemas relacionados con la meteorología. Los filtros de Kalman combinados con técnicas de eliminación de ruido de nubes de puntos vecinas han mejorado la recuperación de datos meteorológicos normales a partir de mediciones tomadas en malas condiciones. Este método de filtrado utiliza filtros estadísticos y de radios para eliminar el ruido. Las pruebas muestran que la calidad de la señal casi iguala el rendimiento en tiempo despejado.
En un estudio de 2022 sobre clasificación meteorológica basada en LiDAR, las redes neuronales profundas alcanzaron una precisión del 96,86% a 30 fotogramas por segundo al distinguir entre distintos tipos de condiciones meteorológicas (SAE Intelligent and Connected Vehicles Symposium, 2022). Los sistemas pueden ajustar su configuración operativa en función de las condiciones meteorológicas actuales. Esto ayuda a los vehículos autónomos a ajustar sus umbrales de detección para mantenerse a salvo a medida que empeoran las condiciones meteorológicas.
Mejoras en el diseño del hardware
Las soluciones físicas incluyen ahora cubiertas protectoras y tratamientos superficiales especializados. Los ingenieros han creado conjuntos de policarbonato con revestimientos UV y duros que mantienen alta la claridad óptica a la vez que resisten los impactos, una característica vital para las operaciones sobre el terreno. Estas cubiertas utilizan sofisticados sellos frontales de junta tórica y prensaestopas NPT para cumplir las normas más estrictas de protección contra el agua y las partículas.
Un gran avance lo constituyen los calentadores de película fina fabricados para las lentes de cobertura LiDAR. Estos elementos calefactores sin cables impiden que se acumule nieve, hielo y niebla, al tiempo que mantienen una alta transmitancia y una dispersión mínima. Los calentadores calientan las cubiertas de los sensores uniformemente, sin crear diferencias de temperatura que puedan afectar a las lecturas.
Enfoques de fusión multisensor
Múltiples tipos de sensores trabajando juntos crean sistemas de apoyo que superan los límites de un solo sensor. Los nuevos métodos de fusión de datos LiDAR y de radar en tiempo de niebla mejoran los datos de radar en el espacio voxel. Esto ayuda a sincronizar y complementar las características en el espacio a vista de pájaro. El resultado es una detección precisa de objetos en 3D, incluso cuando los sensores individuales no funcionan bien.
Los sistemas más avanzados utilizan la fusión adaptativa basada en la entropía para manejar las distorsiones desiguales de los sensores. Un sistema demostró una mejora del 17,6% en la precisión media para detectar peatones en niebla espesa a larga distancia, en comparación con el siguiente mejor método.
Tecnologías emergentes prometedoras
Varias tecnologías nuevas podrían cambiar nuestra forma de afrontar los retos meteorológicos. Los sensores de imagen CMOS emparejados con matrices ópticas en fase ayudan a ver mejor con poca luz. Estas matrices colocan cientos de antenas ópticas con moduladores de amplitud y fase en un chip de silicio para ofrecer patrones de barrido y resolución ajustables.
Las redes lidar meteorológicas ofrecen otra dirección prometedora. Realizan un seguimiento casi continuo y mejoran sustancialmente las previsiones meteorológicas a corto plazo. Esto ayuda a predecir el tiempo severo local y la formación de tormentas mejor que las mediciones tradicionales de radiosonda dos veces al día.
Esta nube de puntos nevada se generó con el software YellowScan CloudStation.
El futuro de los sistemas LiDAR resistentes a la intemperie
Los sistemas LiDAR resistentes a la intemperie se están desarrollando más rápido que nunca, lo que abre nuevas posibilidades para las tecnologías autónomas que funcionan con cualquier tiempo. El LiDAR de estado sólido podría ser el mayor avance en este campo. Elimina los complejos mecanismos de escaneado y las piezas móviles que pueden resultar dañadas por las inclemencias del tiempo. Estos resistentes sensores funcionan bien en diversas condiciones meteorológicas, un requisito vital cuando los vehículos autónomos operan en entornos impredecibles.
La tecnología LiDAR de infrarrojos de onda corta (SWIR) demuestra ser mejor que los sistemas convencionales. Detecta objetos excepcionalmente bien a través de la lluvia, la niebla y la nieve. El SWIR funciona con la misma eficacia a plena luz del sol o en completa oscuridad. Esta mejora aborda los problemas básicos que frenaban el despliegue del LiDAR.
Las nuevas soluciones de calentamiento para objetivos de cobertura LiDAR impiden que se acumule nieve, hielo y niebla, manteniendo intacto el rendimiento óptico. Estos calefactores de película fina sin cables distribuyen el calor uniformemente. No crean diferencias de temperatura ni puntos calientes que puedan falsear las lecturas. Esto ayuda a que el sistema siga siendo fiable incluso en condiciones climáticas invernales adversas.
El sector tiene previsto establecer normas formales antes del primer trimestre de 2025 para evaluar el comportamiento de los LiDAR en condiciones meteorológicas adversas. Estas nuevas normas ayudarán a comparar las distintas tecnologías LiDAR de forma justa y acelerarán las mejoras en la resistencia a la intemperie en todo el sector.
La IA aumentará la capacidad del LiDAR para hacer frente al mal tiempo. Cuando el LiDAR de estado sólido se une a los algoritmos de IA, se crean nuevas posibilidades. Un ejemplo es el recuento preciso de personas en espacios abarrotados, sean cuales sean las condiciones meteorológicas. El nuevo embalaje cerámico ofrece una mejor gestión del calor y una baja inductancia, características clave necesarias para el LiDAR FMCW en los coches.
Estos avances tecnológicos están haciendo que los sistemas LiDAR sean más asequibles y fiables. A medida que bajen los precios, el LiDAR se abrirá camino en más campos, más allá de los coches autoconducidos. La agricultura, la gestión de catástrofes y la logística se verán beneficiadas. Esto acabará creando sistemas que funcionen en todo tipo de condiciones meteorológicas y en muchas aplicaciones.
Preguntas frecuentes
¿Cómo afecta la lluvia al rendimiento del LiDAR?
La lluvia afecta significativamente al LiDAR al dispersar y absorber los rayos láser, reduciendo el alcance de detección y creando retos en el procesamiento de señales. Cuando llueve mucho, la distancia máxima de reconocimiento del LiDAR puede disminuir un 30%, y la densidad de la nube de puntos, un 45%.
¿Puede el LiDAR funcionar eficazmente con niebla y nieve?
El LiDAR funciona sorprendentemente bien en la niebla, a menudo superando a las cámaras. Sin embargo, la nieve plantea mayores desafíos debido al mayor tamaño de las partículas y a los efectos de retrodispersión. La acumulación de hielo en los sensores también puede afectar significativamente a la eficacia del LiDAR en climas fríos.
¿Qué efecto tiene la temperatura en la precisión del LiDAR?
Las fluctuaciones de temperatura pueden afectar significativamente al rendimiento del LiDAR. Las temperaturas extremas afectan a las propiedades de iluminación del láser y pueden provocar la dilatación o contracción térmica de los componentes. Los sistemas LiDAR pueden experimentar una reducción de hasta el 50% en el alcance de detección a temperaturas inferiores a -10 °C.
¿Cómo abordan las soluciones actuales las limitaciones del LiDAR relacionadas con la meteorología?
Las soluciones actuales incluyen algoritmos avanzados de procesamiento de señales, diseños de hardware mejorados como carcasas protectoras y calentadores de película fina, enfoques de fusión multisensor y tecnologías emergentes como el LiDAR de estado sólido y el LiDAR infrarrojo de onda corta (SWIR).
¿Está mejorando la tecnología LiDAR para funcionar en todas las condiciones meteorológicas?
Sí, la tecnología LiDAR está avanzando rápidamente para mejorar el rendimiento en todo tipo de condiciones meteorológicas. Innovaciones como el LiDAR de estado sólido, la tecnología SWIR y la integración de la IA están haciendo que los sistemas LiDAR sean más resistentes a las condiciones meteorológicas adversas. También se están desarrollando normas industriales para evaluar el rendimiento LiDAR en diversas condiciones meteorológicas.