LiDAR para coches: Comprender la tecnología básica

La tecnología de Detección y Alcance de la Luz (LiDAR) impulsa los «ojos» de los vehículos autónomos. El principio del LiDAR es bastante fácil de entender: el sistema mide el tiempo que tardan los impulsos láser en rebotar en los objetos y volver al sensor. Este sencillo concepto crea mapas 3D detallados con una precisión excepcional: unos 0,1 grados de resolución espacial.
Los sistemas LiDAR integran 4 componentes principales, tanto si se montan en vehículos de motor como en aviones o UAV:
- Transmisor láser: Envía pulsos de luz infrarroja a longitudes de onda específicas (850 nm, 905 nm o 1550 nm).
- Receptor fotodetector: Capta los puntos láser reflejados
- Escáner: Agrupa los puntos láser en «nubes de puntos» para construir modelos 3D
- Unidad de procesamiento: Convierte los datos espaciales en mediciones precisas de la posición
El proceso de escaneado LiDAR sigue unos pasos claros. En primer lugar, se dispara un rayo láser y se pone en marcha un reloj temporizador. El haz viaja a través de la óptica, choca con los objetos, rebota a través de la óptica receptora, llega a los fotodetectores que convierten la luz en señales eléctricas y, finalmente, se convierte en datos digitales en forma de nube de puntos.
En la actualidad, los sistemas LiDAR para automóviles se basan en dos métodos principales. El tiempo de vuelo directo (dToF) calcula la distancia midiendo el tiempo de viaje de la luz. La onda continua de frecuencia modulada (FMCW) observa las diferencias de frecuencia entre las ondas láser enviadas y recibidas. La FMCW añade otra característica útil: puede medir la velocidad utilizando el efecto Doppler.
El LiDAR destaca para los vehículos autónomos porque «ve» todo lo que hay alrededor del coche con una excelente percepción de la profundidad. Mientras que las cámaras necesitan luz para funcionar, el LiDAR funciona igual de bien en la oscuridad total y en condiciones meteorológicas adversas. La tecnología puede detectar diferentes objetos con gran precisión, desde coches y personas hasta objetos pequeños como cascos de fútbol.
Los requisitos de seguridad exigen que el LiDAR para automóviles vea a 200-300 metros por delante. Este alcance permite a los vehículos que circulan a más de 100 km/h reaccionar con seguridad ante los obstáculos. Las normas de seguridad ocular también importan: las normas IEC 60825-1 limitan la potencia del láser, lo que afecta a las longitudes de onda que pueden utilizar los fabricantes.
Generación de impulsos láser LiDAR
Los sistemas LiDAR necesitan impulsos láser para cartografiar su entorno. A continuación aprenderás cómo estos impulsos crean la base para una cartografía 3D precisa en aplicaciones de automoción.
Comprender la generación láser en el LiDAR de automoción
El LiDAR comienza con una fuente láser dentro de la unidad. Esta fuente crea pulsos de luz cortos que duran entre nanosegundos y microsegundos. Antes de llegar al entorno, estos pulsos pasan por controladores de haz y sistemas ópticos.
Dos métodos principales generan estos impulsos láser:
- Tiempo de vuelo pulsado (ToF): Envía pulsos de luz separados en momentos específicos
- Onda continua de frecuencia modulada (FMCW): Crea un haz fijo con patrones de frecuencia cambiantes
Los sistemas LiDAR utilizan tres tipos de fuentes láser, cada una con ventajas únicas:
- Láseres emisores de bordes (EEL): Populares en los sistemas de 905 nm, ofrecen un buen valor pero son menos estables espectralmente
- Láseres de emisión superficial de cavidad vertical (VCSEL): Mejor estabilidad térmica (0,06 nm-K-¹ frente a 0,25 nm-K-¹ de los EEL)
- Láseres de fibra: Utilizados en sistemas de 1550 nm, mayor calidad del haz pero cuestan más
Elegir entre 850 nm, 905 nm y 1550 nm
| Longitud de onda | Seguridad ocular | Capacidad de alcance | Factores de coste | Rendimiento meteorológico |
|---|---|---|---|---|
| 850nm | Limitado | Moderado | Inferior | Equilibrado |
| 905nm | Limitado | Hasta ~200m | Más bajo | Mejor con lluvia/nieve |
| 1550 nm | Mayor | Hasta ~350m | Más alto | Mejor con niebla |
La seguridad ocular crea la mayor diferencia entre longitudes de onda. La luz entre 400-1400 nm puede llegar a la retina y causar daños. Sin embargo, las longitudes de onda superiores a 1400 nm se detienen en la superficie del ojo, lo que las hace más seguras. Esta ventaja de seguridad permite a los láseres de 1550 nm utilizar 40 veces más potencia que las versiones de 905 nm.
Frecuencia de Pulso y Energía: Encontrar el equilibrio adecuado
Los sistemas LiDAR modernos disparan pulsos a frecuencias de 50 kHz a 2 MHz. Las frecuencias más altas crean nubes de puntos más densas, mostrando más detalles en el mapa 3D.
Las normas de seguridad ocular establecen límites estrictos para la energía de los impulsos. La norma IEC 60825-1 exige que los LiDAR de automoción cumplan los niveles de seguridad de Clase 1. Esto limita los sistemas de 905 nm a unos 100 metros de alcance.
La anchura del pulso también importa. Los pulsos más cortos pueden dar mejor resolución, pero crean más ruido. La mayoría de los sistemas utilizan pulsos de varios cientos de picosegundos para equilibrar estos factores.

Prueba de coche autónomo con cuatro escáneres LiDAR de 360° (© Unsplash)
Comprender la detección de la señal de retorno del LiDAR
Los sistemas LiDAR deben captar y procesar los impulsos láser después de que reboten en los objetos. A continuación aprenderás cómo estas débiles señales luminosas se convierten en datos eléctricos útiles para la cartografía 3D.
Tipos de fotodetectores LiDAR y sus funciones
Los receptores LiDAR utilizan unos dispositivos especiales de detección de luz llamados fotodetectores. Éstos convierten la luz entrante en señales eléctricas que los ordenadores pueden entender. En los LiDAR modernos para automóviles funcionan tres tipos principales:
Los fotodiodos de avalancha (APD) transforman la luz en corriente eléctrica mediante dos efectos:
- El efecto fotoeléctrico capta la luz
- La multiplicación interna amplifica la señal
Los APD de silicio funcionan bien con la luz infrarroja cercana y cuestan menos, mientras que los APD de InGaAs captan longitudes de onda más largas (1550 nm), pero cuestan más.
Los diodos de avalancha de un solo fotón (SPAD ) funcionan de forma diferente:
- Utiliza el «modo Geiger» con alta tensión inversa
- Puede detectar fotones individuales
- Mide el tiempo con gran precisión (picosegundos)
- Necesitas de 400ns a 1μs de «tiempo de reposo» entre mediciones
Los fotomultiplicadores de silicio (SiPM ) ofrecen la solución más novedosa:
- Sustituye los antiguos APD para luz de 905 nm
- Contienen muchas células SPAD diminutas
- Proporcionan una excelente amplificación de la señal
- Contar el número exacto de fotones
Algunos sistemas necesitan detectores especiales de InP/InGaAs para longitudes de onda más largas. Éstos deben permanecer muy fríos (por debajo de -60°C) y producen más señales no deseadas.
Hacer utilizables las señales débiles
Las señales luminosas que llegan a los fotodetectores empiezan siendo muy débiles. Los amplificadores de transimpedancia (TIA) resuelven este problema convirtiendo las diminutas corrientes de luz en tensiones medibles.
Los TIA actuales alcanzan un rendimiento impresionante:
- Niveles de ruido de hasta 0,2 fA/√Hz
- Ganancia hasta 10^13 V/A
Los AIT modernos incorporan varias funciones útiles:
- Los circuitos de filtrado de luz eliminan la luz ambiental no deseada
- Los sistemas de protección gestionan la sobrecarga de la señal
- Los conmutadores de canales reducen los componentes necesarios
Gestionar el ruido representa el mayor reto. Tres enfoques principales ayudan a obtener señales más claras:
- Utilizar pulsos láser más potentes
- Hacer los detectores más sensibles
- Filtrar el ruido
Los filtros avanzados utilizan estadísticas y algoritmos inteligentes que se adaptan a las condiciones cambiantes. Éstos deben funcionar instantáneamente para el LiDAR de automoción a pesar de necesitar cálculos complejos.

Mapa 3D del entorno generado por LiDAR desde un vehículo autónomo, detectando objetos en tiempo real
Medición del tiempo de vuelo: Cómo calcula la distancia el LiDAR
El principio del LiDAR es bastante fácil de entender: medir distancias utilizando señales luminosas reflejadas. Dos métodos principales se encargan de esta tarea, cada uno de los cuales funciona de forma diferente y ofrece ventajas únicas.
Métodos directos del tiempo de vuelo (dToF)
dToF mide el tiempo exacto entre el envío de un pulso láser y la recepción de su retorno. Las matemáticas parecen sencillas: la distancia es igual a la mitad del tiempo de ida y vuelta multiplicado por la velocidad de la luz. Pero el tiempo debe ser perfecto: un solo nanosegundo de desviación supone un error de 15 centímetros en la distancia.
Los sistemas dToF de automoción actuales funcionan de dos formas:
- Modo de disparo único: Dispara un pulso, mide su tiempo de retorno
- Modo multidisparo: Crea patrones de tiempo a partir de muchos pulsos para obtener señales más claras
Los sistemas utilizan convertidores tiempo-digital (TDC) o convertidores analógico-digital (ADC) para procesar las señales. Los sistemas ADC cuestan más, pero funcionan mejor porque pueden ejecutar métodos de detección avanzados que van más allá de la simple temporización.
Comprender el LiDAR FMCW
La FMCW ofrece un enfoque diferente que está ganando popularidad en los coches. En lugar de pulsos separados, envía ondas láser continuas que cambian de frecuencia siguiendo un patrón (llamado luz chirriante). La diferencia de frecuencia entre la luz enviada y la devuelta -la frecuencia de batido- nos indica la distancia del objetivo.
La FMCW aporta varias ventajas:
- Mide la distancia y la velocidad a la vez mediante el efecto Doppler
- Consume menos energía que el dToF para el mismo alcance
- Funciona mejor cuando varios LiDAR operan cerca
- Funciona bien en condiciones difíciles
Cómo afecta el tiempo a la precisión del LiDAR
La meteorología puede influir mucho en el funcionamiento del LiDAR. La lluvia crea dos problemas:
- Las gotas de lluvia reflejan los impulsos antes de que lleguen a los objetivos
- Las mediciones de distancia se equivocan al golpear las gotas de lluvia
La niebla causa los mayores quebraderos de cabeza al LiDAR. Las moléculas de agua de la niebla dispersan la luz por todas partes, lo que dificulta distinguir los objetos reales de las gotas de agua. El rendimiento empeora a medida que la niebla se espesa: la detección empieza a fallar a los 10 mm/h de lluvia y deja de funcionar a los 50 mm/h.
La nieve provoca problemas similares al reflejar y dispersar la luz. Incluso en días despejados, la luz solar brillante puede engañar al sistema para que vea cosas que no existen.
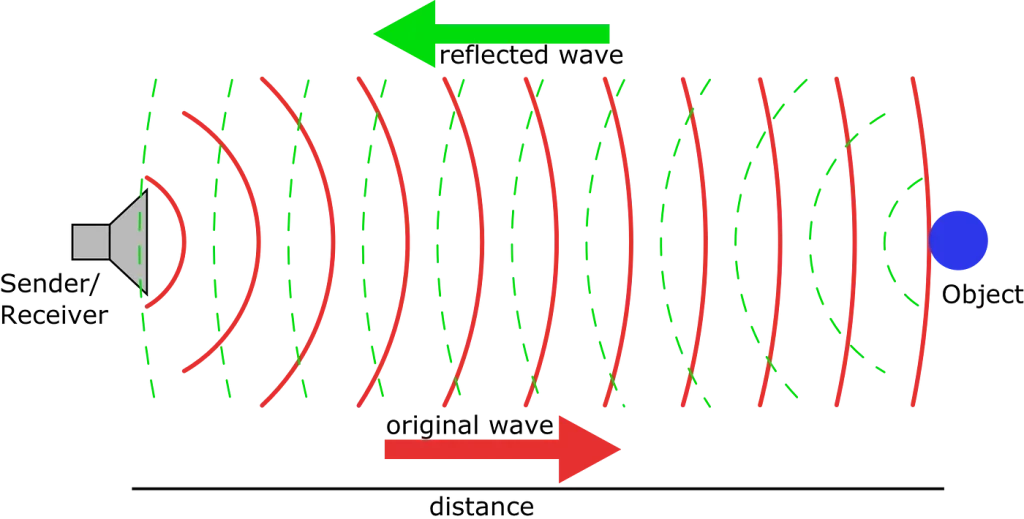
Principio básico de la medición de distancias por reflexión de ondas
Crear nubes de puntos 3D a partir de datos LiDAR
Los escáneres LiDAR capturan nubes de puntos 3D. Pero, ¿cómo se convierten estas mediciones de distancia en modelos 3D útiles? Esta sección explica cómo los datos brutos se transforman en mapas detallados que ayudan a los vehículos a navegar.
Construir nubes de puntos paso a paso
Los sistemas LiDAR recogen dos tipos principales de información:
- Qué distancia recorrió la luz
- La intensidad de la señal devuelta
Estos datos se convierten en una nube de puntos 3D: un mapa detallado de todo lo que rodea al sensor.
Diferentes algoritmos se encargan de tareas específicas en la generación de nubes de puntos:
- Los algoritmos de filtrado limpian los datos desordenados
- Los algoritmos de segmentación agrupan puntos similares
- La detección del terreno ayuda a detectar rasgos importantes
Para los coches, los algoritmos de agrupación resultan especialmente útiles. El algoritmo de Agrupación de Nubes de Puntos en Tiempo Real (RTPCC-RL) ordena los puntos por distancia para trabajar más rápido. Este método procesa los datos en sólo 100 milisegundos sin perder precisión.
Comprender la calidad de las nubes de puntos
La densidad de puntos nos indica lo detallado que es nuestro mapa 3D. La medimos en puntos por metro cuadrado (ppsm). Diferentes trabajos necesitan diferentes densidades:
- Aparcamientos: 2-4 ppsm funcionan bien
- Identificación de vehículos: necesidades 8-16 ppsm
- Estudios de árboles: hasta 50 ppsm para los primeros retornos, llegando a 200 ppsm en total
La resolución espacial depende principalmente de dos cosas:
- Anchura de propagación de cada pulso láser (IFOV)
- A qué distancia están los objetos
Los mejores sistemas LiDAR manejan esto de forma inteligente. Algunos utilizan resolución variable, muy precisa (0,07°) en el centro mientras ven 28° en total a su alrededor.
Hacer que funcione en tiempo real
El LiDAR para automóviles se enfrenta a un duro reto: procesar grandes cantidades de datos al instante. Cada escaneado crea millones de puntos que necesitan un tratamiento rápido. Esto se complica con la limitada potencia informática de los coches.
La velocidad es tan importante como la precisión. Aunque algunos métodos como el procesamiento de histogramas funcionan bien, necesitan mucha potencia de cálculo. Tres enfoques principales ayudan a resolver esto:
- 1. Mejores sistemas de transferencia de datos
- 2. Compresión especial de datos
- 3. Organización de puntos basada en cuadrículas
Ayudan a superar el mayor reto: los coches deben comprender su entorno en milisegundos para conducir con seguridad. Los sistemas actuales mejoran cada vez más este rápido procesamiento, permitiendo funciones que van desde la prevención de colisiones a la lectura de señales de tráfico.

Calle urbana capturada como nube de puntos LiDAR 3D con una trayectoria de navegación planificada
Tecnología LiDAR: ¿Qué viene después?
La tecnología LiDAR es cada vez más pequeña, barata y mejor. Las cifras del mercado lo dicen todo: las ventas de LiDAR para automóviles deberían pasar de 538 millones de USD en 2023 a 3632 millones de USD en 2029, con un crecimiento anual del 38%.
El LiDAR de estado sólido lidera el camino a seguir. Ahora mismo, los sistemas híbridos con espejos giratorios representan el 66% de las ventas previstas para 2024, mientras que los sistemas basados en MEMS suponen el 32%. De cara al futuro, los LiDAR totalmente de estado sólido -especialmente los flash LiDAR- deberían acaparar el 37% del mercado. Estos sistemas funcionan mejor, necesitan menos mantenimiento y cuestan menos de fabricar.
El principio del LiDAR es bastante fácil de entender, pero hacerlo asequible presenta desafíos. Los sistemas actuales de largo alcance cuestan unos 500 USD. Para un uso generalizado, los precios tienen que bajar por debajo de 300 USD para las unidades de largo alcance y de 100 USD para las de corto alcance. Algunos fabricantes chinos ya ofrecen sistemas por debajo de 500 USD.
La tecnología de infrarrojo cercano (NIR) domina el LiDAR actual:
- Las longitudes de onda de 905/940 nm alimentarán el 90% de los sistemas LiDAR para automóviles previstos para 2024
- Esta división entre NIR e infrarrojo de onda corta debería mantenerse estable durante años
Siguen surgiendo nuevas ideas. Una utiliza ondas sonoras en lugar de piezas mecánicas para dirigir los rayos láser. Esto podría reducir los sistemas LiDAR del tamaño de una taza de café al de una caja de cerillas.
El LiDAR FMCW es prometedor para una mejor detección del alcance y la velocidad, pero no esperes verlo en los coches antes de 2027-2028.
Además de un mejor hardware, los sistemas LiDAR funcionarán con:
- Redes 5G
- Inteligencia artificial
- Herramientas cartográficas en tiempo real
Estos avances ayudarán a que los coches autoconducidos funcionen mejor y crearán nuevos usos en la agricultura, el transporte marítimo y la exploración médica.
Preguntas frecuentes
¿Cómo crea la tecnología LiDAR mapas 3D para vehículos autónomos?
El LiDAR crea mapas en 3D emitiendo impulsos láser y midiendo el tiempo que tardan en reflejarse en los objetos y volver al sensor. A continuación, estos datos se procesan para generar una representación detallada en forma de nube de puntos del entorno del vehículo, proporcionando información espacial y de distancias precisa.
¿Cuáles son los componentes clave de un sistema LiDAR de automoción?
Un sistema LiDAR de automoción suele constar de cuatro componentes principales: un transmisor láser que emite pulsos de luz, un receptor fotodetector que capta la luz reflejada, un escáner que agrupa los puntos recibidos y una unidad de procesamiento que calcula las posiciones precisas y crea modelos 3D.
¿Cómo se comporta el LiDAR en diferentes condiciones meteorológicas?
El rendimiento del LiDAR puede verse afectado por condiciones meteorológicas adversas. La lluvia y la nieve pueden reducir la densidad y la precisión de la nube de puntos, mientras que la niebla presenta retos importantes al difuminar la luz y crear ruido. Sin embargo, el LiDAR suele funcionar mejor que las cámaras en condiciones de poca luz y puede seguir proporcionando datos valiosos en muchos entornos difíciles.
¿Qué avances se están produciendo en la tecnología LiDAR para automóviles?
La futura tecnología LiDAR se está centrando en sistemas de estado sólido sin piezas móviles, que ofrecen mayor fiabilidad y menores costes. Otros avances incluyen el desarrollo de LiDAR FMCW (Onda Continua de Frecuencia Modulada) para mediciones simultáneas de distancia y velocidad, y la integración de LiDAR con redes de IA y 5G para mejorar las capacidades.
¿Cómo se compara el LiDAR con otras tecnologías de detección utilizadas en los vehículos autónomos?
El LiDAR ofrece una resolución espacial y una percepción de la profundidad superiores a las de los métodos de detección tradicionales. A diferencia de las cámaras que se basan en la luz visible, el LiDAR puede funcionar eficazmente en la oscuridad y en condiciones meteorológicas difíciles. También puede diferenciar entre varios tipos de objetos con gran precisión, lo que la convierte en una tecnología crucial para la navegación autónoma de vehículos y la detección de obstáculos.