Conceptos básicos de la nube de puntos LiDAR

Este artículo explica qué son las nubes de puntos LiDAR y cómo se utilizan. Aprenderás cómo se recogen, qué datos se almacenan dentro de una nube de puntos y cómo visualizarlos. Por último, aprenderás cómo se gestionan y procesan los datos de las nubes de puntos para poder utilizarlos en diversas aplicaciones.
Definir una nube de puntos LiDAR
Es una colección de puntos generados por un sensor. Estas colecciones pueden ser muy densas y contener miles de millones de puntos, lo que permite crear representaciones 3D muy detalladas de una zona. Se utilizan en aplicaciones como la vigilancia medioambiental, la cartografía, la planificación urbana, la vigilancia de infraestructuras, etc.
Las nubes de puntos son un tipo específico de nube de puntos: se generan utilizando impulsos láser para medir distancias a objetos y crear representaciones tridimensionales del entorno. Estos impulsos láser proceden de un dispositivo LiDAR (también conocido como escáner láser 3D). Para más información sobre cómo funciona el LiDAR, consulta este artículo. Aprende más sobre cómo funcionan los escáneres LiDAR en este artículo.
Otros tipos de nubes de puntos que se generan utilizando diferentes tecnologías y métodos son la fotogrametría, el sonar y el radar, entre otros.

Las nubes de puntos se utilizan para aplicaciones de cartografía topográfica. (Fuente: www.pexels.com)
Las ventajas de las nubes de puntos LiDAR
Ofrecen múltiples ventajas para distintos sectores:
- Muestran con precisión dónde se encuentran los objetos y las estructuras dentro del entorno. Estos datos 3D de alta precisión son necesarios para aplicaciones de topografía, cartografía e ingeniería.
- Como los datos se capturan en 3D, pueden facilitar la visualización en 3D y el análisis del entorno estudiado, por ejemplo para la creación de un gemelo digital.
- Contienen abundante información geométrica, que facilita el análisis detallado y el modelado del terreno, las infraestructuras y las características naturales.
- Permiten el reconocimiento y la clasificación automatizados de objetos, de modo que se puedan identificar y clasificar elementos como edificios, carreteras e infraestructuras.
Una característica única de la tecnología LiDAR es que un único pulso láser emitido puede tener múltiples retornos cuando encuentra e interactúa con múltiples superficies a lo largo de su trayectoria. Según el orden de detección, un sistema LiDAR puede distinguir entre distintos tipos de retornos.
Estos retornos múltiples proporcionan información valiosa sobre la estructura, la composición y la topografía del entorno estudiado, que es relevante para aplicaciones como la silvicultura, la cartografía de la vegetación y el modelado del terreno.

Las nubes de puntos proporcionan información relevante para las aplicaciones forestales. (Fuente: www.pexels.com)
¿Qué información se almacena en un punto LiDAR?
Las nubes de puntos proporcionan valiosos datos de localización para distintas aplicaciones. Para comprender mejor su popularidad y ventajas, dediquemos un momento a hablar de los datos que contienen. A continuación, hablaremos de cómo se capturan, almacenan, procesan y visualizan, antes de transformarlos en productos 3D útiles para distintas aplicaciones.
Los puntos individuales de una nube de puntos contienen información como las coordenadas 3D (X, Y y Z), pero eso no es todo: junto con las coordenadas, se capta la intensidad de la señal láser de retorno. Es una información valiosa que nos dice más cosas sobre la densidad del objeto o la composición del material.
Si se utiliza un esquema de clasificación para una exploración, es posible agrupar puntos individuales en clases diferentes basándose en las etiquetas de clasificación individuales que representan objetos o características diferentes. A continuación se muestra un ejemplo que muestra todos los puntos individuales dentro de una nube de puntos que pertenecen a una única clase que representa el suelo o la superficie (mostrados en marrón), mientras que el resto de los puntos se muestran en gris.
Además, los puntos individuales pueden contener atributos adicionales, como el número de retorno, el ángulo de exploración, la dirección de exploración, la densidad de puntos, los valores de color RGB y las marcas de tiempo. He aquí un ejemplo de los mismos datos que en la imagen anterior, esta vez utilizando valores RGB como clase principal de simbología:
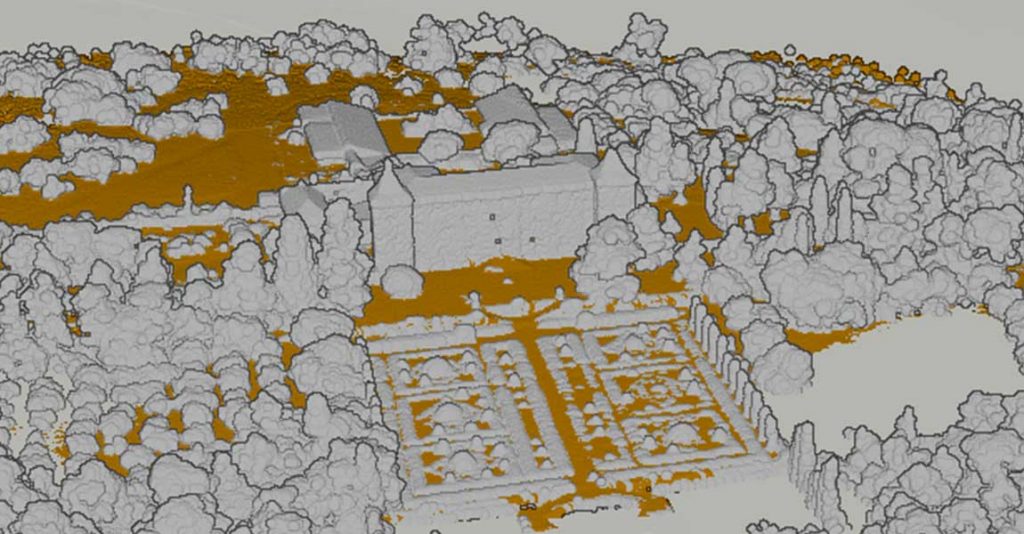
Visualización de una nube de puntos mediante clasificación para la clase «suelo
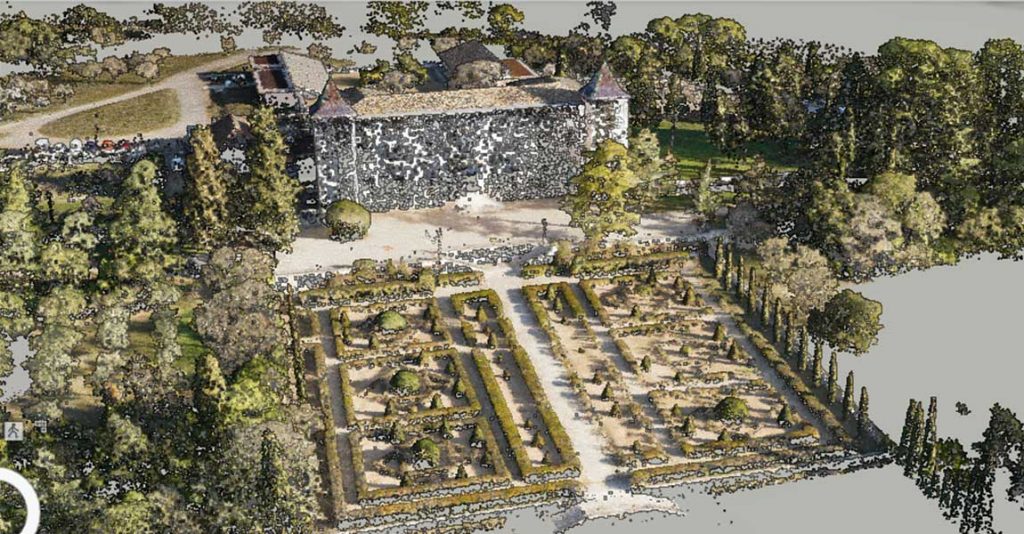
Visualización de una nube de puntos LiDAR utilizando valores RGB como clase principal de simbología
Diferentes tipos de sistemas de escaneado LiDAR
Ahora centrémonos en cómo se capturan. Existen distintos tipos de sistemas de escaneado LiDAR para generar nubes de puntos. Normalmente, se distingue entre escaneado aéreo y terrestre:
- El escaneado láser aerotransportado utiliza aviones tripulados para cartografiar grandes zonas desde una gran altura, mientras que los sistemas basados en drones captan zonas más pequeñas y cercanas al suelo. Obtén más información sobre el LiDAR basado en drones en este artículo.
- El escaneado láser terrestre utiliza escáneres láser estáticos para capturar una zona, mientras que el escaneado móvil utiliza un dispositivo en movimiento (como un coche o un tren) para capturar zonas más grandes desplazando un dispositivo de escaneado mientras captura una nube de puntos 3D.
Estos diferentes tipos de sistemas de escaneado se utilizan para diferentes aplicaciones. Sin embargo, el proceso de generación de datos es similar para cada uno de ellos. Esto se explica a continuación.

Sistema LiDAR YellowScan Navigator montado en el UAV Hexadrone Tundra
Cómo se generan las nubes de puntos LiDAR
Los escáneres LiDAR de tiempo de vuelo están equipados con sensores que emiten grandes volúmenes de pulsos láser. Cuando los impulsos láser encuentran objetos o superficies en el entorno, se reflejan en ellos en distintas direcciones. Los impulsos láser reflejados son detectados por el sensor, que calcula la distancia entre el sensor y el objeto que refleja el impulso utilizando la velocidad de la luz y el tiempo que tarda cada impulso en volver al sensor.
A continuación, las distancias medidas se utilizan para calcular las coordenadas 3D de cada punto. Una nube de puntos es una colección de todos los puntos individuales que representan la geometría y la distribución espacial de los objetos en el área de escaneado. En el caso de una plataforma de exploración en movimiento, un sistema GNSS y de unidad de medición inercial (IMU) a bordo registra información adicional para seguir la posición y orientación de la plataforma de exploración. Esto es necesario para georreferenciar directamente los datos capturados.
Cuando se utiliza un escáner láser terrestre estático para escanear el entorno, pueden ser necesarios varios escaneados desde distintas posiciones o puntos de vista para capturar objetos y estructuras de gran tamaño. Un único conjunto de datos de nubes de puntos puede contener varias exploraciones desde distintos puntos de vista. Todos ellos pueden visualizarse en una única nube de puntos utilizando un único sistema de referencia espacial.
Formatos de archivo de nubes de puntos LiDAR
Pueden almacenarse en distintos formatos de archivo, como LAS, LAZ o E57. LAS es uno de los formatos más utilizados para almacenar datos, mientras que LAZ es una versión comprimida del formato LAS. Esto permite reducir considerablemente el tamaño de los archivos, conservando la precisión de los datos. E57 es un formato de archivo independiente del proveedor para almacenar datos de imágenes 3D, incluidos los datos de nubes de puntos. Las nubes de puntos pueden almacenarse localmente, en una red o en la nube.
Diferentes formas de visualizar nubes de puntos
Hemos visto que contienen puntos tridimensionales en el espacio y datos adicionales sobre lo que representan esos puntos. A continuación, pueden visualizarse utilizando herramientas informáticas especializadas, como SIG, software de visualización y software de modelado 3D y CAD. Además de las soluciones basadas en software, también pueden visualizarse directamente en navegadores web mediante aplicaciones basadas en web o utilizando tecnología AR/VR que permite a los usuarios sumergirse en un entorno 3D e interactuar con los datos.
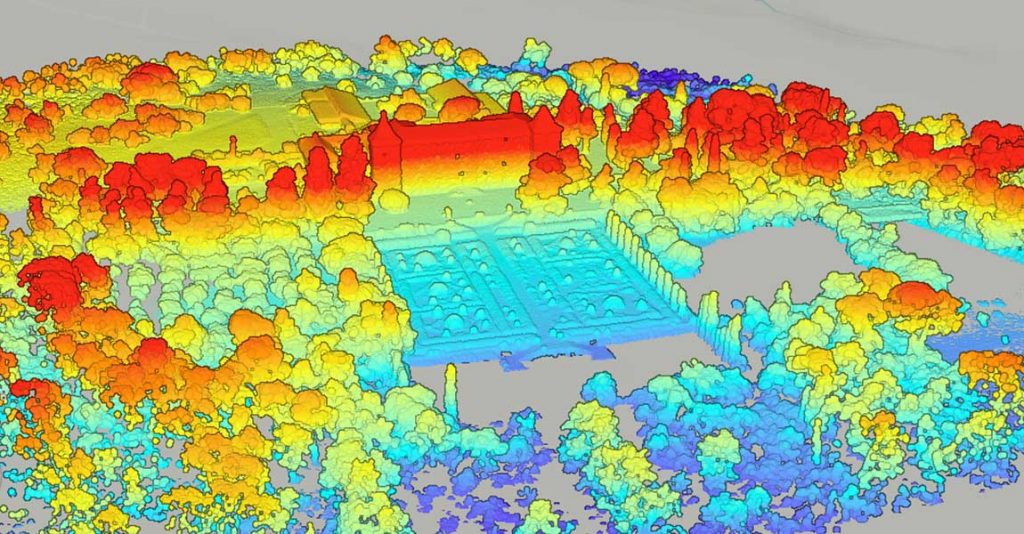
Un archivo LAS visualizado en ArcGIS Pro a partir de valores de elevación (fuente de datos: YellowScan)
Software especializado para otras tareas de gestión de datos
Aunque la visualización de una nube de puntos puede ser suficiente para fines de inspección, se necesita software especializado para realizar distintas tareas con los datos brutos, como el procesamiento de datos, el filtrado, la segmentación, el análisis y la extracción de características, entre otras. Éstas son algunas de las tareas que suelen realizarse en las nubes de puntos brutas:
- Realizar operaciones de postprocesamiento para mejorar la calidad, la precisión y la utilidad. Esto puede incluir eliminar el ruido o los valores atípicos, y filtrar o clasificar los puntos en diferentes clases o categorías de objetos.
- Combinar nubes de puntos con otras fuentes de datos para enriquecer los datos para su análisis y visualización.
- Extracción de características relevantes dentro de una nube de puntos mediante algoritmos de reconocimiento de objetos.
Estos y otros pasos son necesarios antes de poder generar diferentes productos 3D para diversas aplicaciones industriales. Estos productos derivados de nubes de puntos incluyen modelos urbanos en 3D, DEM/DSM, curvas de nivel, secciones transversales, líneas de ruptura, etc.
Racionalización de todo el flujo de trabajo de procesamiento de datos
YellowScan CloudStation es una solución de software que proporciona una plataforma completa para procesar, visualizar y compartir los datos capturados por los sistemas LiDAR UAV de YellowScan. Al agilizar el flujo de trabajo de procesamiento de datos, desde la importación y el procesamiento de datos hasta la visualización y el análisis, los usuarios pueden extraer información procesable y tomar decisiones informadas a partir de los datos topográficos LiDAR de los UAV.
Entre sus principales características se incluyen el procesamiento automatizado de datos, la extracción de características y la clasificación. Además, CloudStation facilita la colaboración y el intercambio de datos entre las partes interesadas. También proporciona exportación de archivos LAS, lo que permite a los usuarios transferir sin problemas datos y productos derivados para su posterior análisis, visualización e integración en los flujos de trabajo existentes.
La CloudStation está disponible en tres paquetes diferentes:
- Esencial: Visualiza, inspecciona, colorea a partir de ortofotos y exporta tus datos.
- Pro: Visualiza, inspecciona, refina la calidad de tus datos, enriquécelos con clasificación y color, y desbloquea más funciones de exportación.
- Lo último: Cero compromiso, todas las funciones activadas. Incluye la generación de ortofotos y el procesamiento por línea de comandos (ytk) para automatización y procesamiento por lotes.

Captura de pantalla del software de procesamiento LiDAR YellowScan CloudStation
Preguntas frecuentes
¿Cuántos puntos contiene una nube de puntos LiDAR?
La cantidad de nubes de puntos en un solo punto depende de muchos factores, como la densidad de puntos, la precisión y la distribución de los puntos dentro del conjunto de datos. La cantidad total de puntos por conjunto de datos puede variar de miles de millones de puntos a cientos de miles de puntos.
¿Cuál es el tamaño típico del área de una nube de puntos LiDAR?
No hay un tamaño de área fijo. Esto también depende de múltiples factores, como la altitud de vuelo en caso de un sistema aerotransportado o basado en drones, así como las especificaciones del sensor y la densidad de puntos. Es posible escanear zonas pequeñas con LiDAR basado en drones y zonas grandes con sistemas de cartografía aérea.
¿Para qué se utiliza una nube de puntos LiDAR?
Los usos más comunes son la gestión forestal, los estudios arqueológicos, la exploración geológica, así como la cartografía topográfica, el modelado de infraestructuras y la planificación y el desarrollo urbanos.
¿Cuál es el tamaño de archivo de una nube de puntos LiDAR?
El tamaño del archivo depende del tipo de archivo elegido, así como del área de estudio, la densidad de puntos y el número y complejidad asociados a cada punto de la nube de puntos. Dependiendo de estos factores, un solo archivo puede tener desde unos pocos megabytes hasta varios terabytes.