Les bases du nuage de points LiDAR

Cet article explique ce que sont les nuages de points LiDAR et comment ils sont utilisés. Vous apprendrez comment ils sont collectés, quelles données sont stockées dans un nuage de points et comment les visualiser. Enfin, vous apprendrez comment les données des nuages de points sont gérées et traitées afin d’être utilisées pour diverses applications.
Définition d’un nuage de points LiDAR
Il s’agit d’une collection de points générés par un capteur. Ces collections peuvent être très denses et contenir des milliards de points, ce qui permet de créer des représentations 3D très détaillées d’une zone. Ils sont utilisés dans des applications telles que la surveillance de l’environnement, la cartographie, la planification urbaine, la surveillance des infrastructures, etc.
Les nuages de points sont un type particulier de nuages de points : ils sont générés à l’aide d’impulsions laser pour mesurer les distances entre les objets et créer des représentations en 3D de l’environnement. Ces impulsions laser proviennent d’un dispositif LiDAR (également appelé scanner laser 3D). Pour plus d’informations sur le fonctionnement du LiDAR, consultez cet article. Pour en savoir plus sur le fonctionnement des scanners LiDAR, consultez cet article.
D’autres types de nuages de points sont générés à l’aide de différentes technologies et méthodes, notamment la photogrammétrie, le sonar et le radar.

Les nuages de points sont utilisés pour les applications de cartographie topographique. (Source : www.pexels.com)
Les avantages des nuages de points LiDAR
Ils offrent de multiples avantages à différentes industries :
- Ils indiquent avec précision l’emplacement des objets et des structures dans l’environnement. Ces données 3D de haute précision sont nécessaires pour les applications d’arpentage, de cartographie et d’ingénierie.
- Les données étant capturées en 3D, elles peuvent faciliter la visualisation et l’analyse en 3D de l’environnement étudié, par exemple pour la création d’un jumeau numérique.
- Elles contiennent de nombreuses informations géométriques qui facilitent l’analyse détaillée et la modélisation du terrain, de l’infrastructure et des caractéristiques naturelles.
- Ils permettent la reconnaissance et la classification automatisées des objets, de sorte que des caractéristiques telles que les bâtiments, les routes et les infrastructures peuvent être identifiées et classées.
Une caractéristique unique de la technologie LiDAR est qu’une seule impulsion laser émise peut avoir plusieurs retours lorsqu’elle rencontre et interagit avec plusieurs surfaces le long de sa trajectoire. En fonction de l’ordre de détection, un système LiDAR peut distinguer différents types de retours.
Ces retours multiples fournissent des informations précieuses sur la structure, la composition et la topographie de l’environnement étudié, qui sont utiles pour des applications telles que la sylviculture, la cartographie de la végétation et la modélisation du terrain.

Les nuages de points fournissent des informations pertinentes pour les applications forestières. (Source : www.pexels.com)
Quelles sont les informations stockées dans un point LiDAR ?
Les nuages de points fournissent des données de localisation précieuses pour différentes applications. Pour mieux comprendre leur popularité et leurs avantages, prenons le temps de discuter des données qu’ils contiennent. Nous verrons ensuite comment elles sont capturées, stockées, traitées et visualisées, avant d’être transformées en produits 3D utiles pour différentes applications.
Les points individuels d’un nuage de points contiennent des informations telles que les coordonnées 3D (X, Y et Z), mais ce n’est pas tout : en plus des coordonnées, l’intensité du signal de retour du laser est capturée. Il s’agit d’une information précieuse qui nous renseigne sur la densité de l’objet ou la composition du matériau.
Si un système de classification est utilisé pour un balayage, il est possible de regrouper des points individuels dans différentes classes sur la base des étiquettes de classification individuelles qui représentent différents objets ou caractéristiques. Voici un exemple montrant tous les points individuels à l’intérieur d’un nuage de points appartenant à une seule classe qui représente le sol ou la surface (en marron), tandis que le reste des points est affiché en gris.
En outre, les points individuels peuvent contenir des attributs supplémentaires tels que le numéro de retour, l’angle de balayage, la direction de balayage, la densité des points, les valeurs de couleur RVB et les horodatages. Voici un exemple des mêmes données que dans l’image précédente, en utilisant cette fois les valeurs RVB comme classe de symbologie principale :
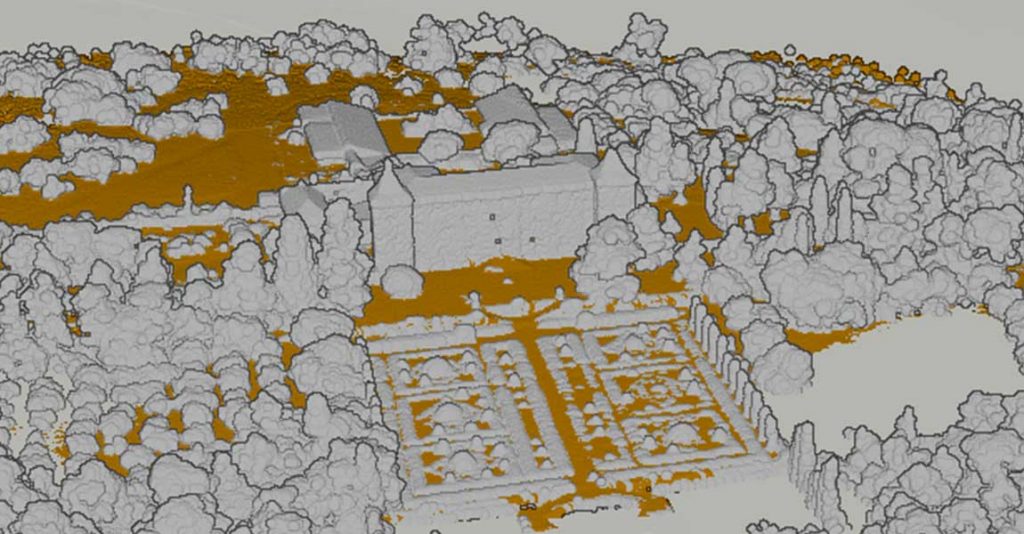
Visualisation d’un nuage de points à l’aide de la classification pour la classe « sol ».
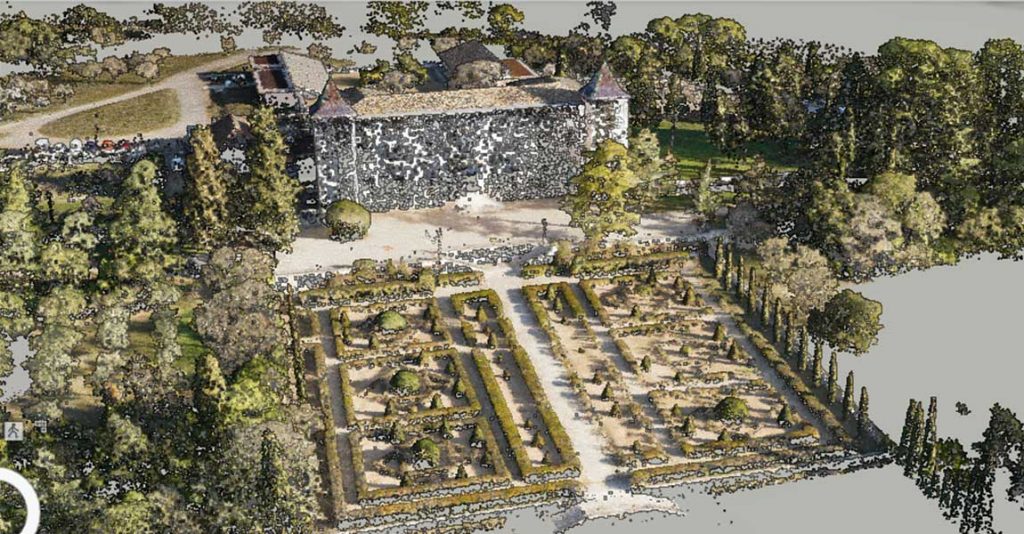
Visualisation d’un nuage de points LiDAR utilisant les valeurs RVB comme classe de symbologie principale.
Différents types de systèmes de balayage LiDAR
Concentrons-nous à présent sur la manière dont ils sont capturés. Il existe différents types de systèmes de balayage LiDAR permettant de générer des nuages de points. On fait généralement la distinction entre le balayage aérien et le balayage terrestre :
- Le balayage laser aéroporté utilise des avions pilotés pour cartographier de grandes zones depuis une grande hauteur, tandis que les systèmes basés sur des drones capturent des zones plus petites, plus proches du sol. Pour en savoir plus sur le LiDAR par drone, consultez cet article.
- Le balayage laser terrestre utilise des scanners laser statiques pour capturer une zone, tandis que le balayage mobile utilise un dispositif mobile (comme une voiture ou un train) pour capturer de plus grandes zones en déplaçant un dispositif de balayage tout en capturant un nuage de points en 3D.
Ces différents types de systèmes de balayage sont utilisés pour différentes applications. Cependant, le processus de génération des données est similaire pour chacun d’entre eux. Ce point est expliqué ci-après.

Système LiDAR YellowScan Navigator monté sur le drone Hexadrone Tundra
Comment les nuages de points LiDAR sont-ils générés ?
Les scanners LiDAR à temps de vol sont équipés de capteurs qui émettent de grands volumes d’impulsions laser. Lorsque les impulsions laser rencontrent des objets ou des surfaces dans l’environnement, elles se réfléchissent dans différentes directions. Les impulsions laser réfléchies sont détectées par le capteur, qui calcule la distance entre le capteur et l’objet qui réfléchit l’impulsion en utilisant la vitesse de la lumière et le temps nécessaire pour que chaque impulsion revienne au capteur.
Ensuite, les distances mesurées sont utilisées pour calculer les coordonnées 3D de chaque point. Un nuage de points unique est une collection de tous les points individuels qui représentent la géométrie et la distribution spatiale des objets dans la zone de balayage. Dans le cas d’une plate-forme de balayage mobile, un système GNSS embarqué et une unité de mesure inertielle (IMU) enregistrent des informations supplémentaires pour suivre la position et l’orientation de la plate-forme de balayage. Ceci est nécessaire pour le géoréférencement direct des données capturées.
Lorsqu’un scanner laser terrestre statique est utilisé pour numériser l’environnement, il peut être nécessaire d’effectuer plusieurs numérisations à partir de différentes positions ou points de vue pour capturer des objets et des structures de grande taille. Un seul ensemble de données de nuages de points peut contenir plusieurs numérisations à partir de différents points de vue. Tous ces éléments peuvent être visualisés dans un seul nuage de points en utilisant un seul système de référence spatiale.
Formats des fichiers de nuages de points LiDAR
Ils peuvent être stockés dans différents formats de fichiers, notamment LAS, LAZ ou E57. LAS est l’un des formats les plus utilisés pour le stockage des données, tandis que LAZ est une version compressée du format LAS. Cela permet de réduire considérablement la taille des fichiers tout en préservant la précision des données. E57 est un format de fichier neutre pour le stockage de données d’imagerie 3D, y compris les données de nuages de points. Les nuages de points peuvent être stockés localement, sur un réseau ou dans le nuage.
Différentes façons de visualiser les nuages de points
Nous avons vu qu’ils contiennent des points 3D dans l’espace et des données supplémentaires sur ce que ces points représentent. Ensuite, ils peuvent être visualisés à l’aide d’outils logiciels spécialisés, notamment les SIG, les logiciels de visualisation et les logiciels de modélisation 3D et de CAO. Outre les solutions logicielles, les données peuvent également être visualisées directement dans les navigateurs web par le biais d’applications web ou en utilisant la technologie AR/VR qui permet aux utilisateurs de s’immerger dans un environnement 3D et d’interagir avec les données.
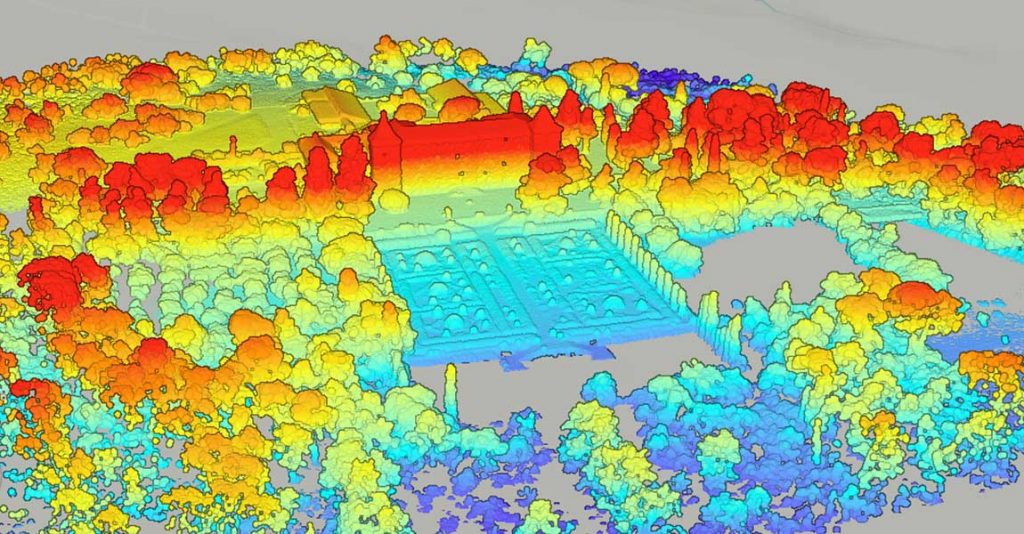
Un fichier LAS visualisé dans ArcGIS Pro sur la base des valeurs d’élévation (source de données : YellowScan)
Logiciel spécialisé pour d’autres tâches de gestion des données
Si la visualisation d’un nuage de points peut suffire à des fins d’inspection, des logiciels spécialisés sont nécessaires pour effectuer différentes tâches sur les données brutes, telles que le traitement des données, le filtrage, la segmentation, l’analyse et l’extraction de caractéristiques, entre autres. Ce sont là quelques-unes des tâches qui sont souvent effectuées sur des nuages de points bruts :
- Effectuer des opérations de post-traitement pour améliorer la qualité, la précision et la facilité d’utilisation. Il peut s’agir d’éliminer le bruit ou les valeurs aberrantes, de filtrer ou de classer les points dans différentes classes ou catégories d’objets.
- Combinaison de nuages de points avec d’autres sources de données afin d’enrichir les données pour l’analyse et la visualisation.
- Extraction de caractéristiques pertinentes à l’intérieur d’un nuage de points à l’aide d’algorithmes de reconnaissance d’objets.
Ces étapes, ainsi que d’autres, sont nécessaires avant de pouvoir générer différents produits 3D pour diverses applications industrielles. Ces produits dérivés de nuages de points comprennent des modèles urbains en 3D, des MNE/DSM, des courbes de niveau, des coupes transversales, des lignes de rupture, etc.
Rationalisation de l’ensemble du processus de traitement des données
YellowScan CloudStation est une solution logicielle qui fournit une plateforme complète pour le traitement, la visualisation et le partage des données capturées par les systèmes UAV LiDAR de YellowScan. En rationalisant le flux de traitement des données, depuis l’importation et le traitement des données jusqu’à la visualisation et l’analyse, les utilisateurs peuvent extraire des informations exploitables et prendre des décisions éclairées à partir des données de levés LiDAR par drone.
Les principales caractéristiques sont le traitement automatisé des données, l’extraction des caractéristiques et la classification. En outre, CloudStation facilite la collaboration et le partage des données entre les parties prenantes. Il permet également d’exporter des fichiers LAS, ce qui permet aux utilisateurs de transférer de manière transparente des données et des produits dérivés en vue d’une analyse plus approfondie, d’une visualisation et d’une intégration dans les flux de travail existants.
La CloudStation est disponible en trois offres différentes :
- Essentiel : Visualisez, inspectez, colorez des orthophotos et exportez vos données.
- Pro : Visualisez, inspectez, affinez la qualité de vos données, enrichissez vos données avec la classification et la couleur, et débloquez plus de fonctionnalités d’exportation.
- Ultime : Zéro compromis, toutes les fonctionnalités sont activées. Inclut la génération d’orthophotos et le traitement en ligne de commande (ytk) pour l’automatisation et la mise en lots.

Capture d’écran du logiciel de traitement LiDAR YellowScan CloudStation
Questions fréquemment posées
Combien de points contient un nuage de points LiDAR ?
La quantité de nuages de points en un seul point dépend de nombreux facteurs, notamment de la densité des points, de la précision et de la distribution des points dans le jeu de données. Le nombre total de points par ensemble de données peut varier de plusieurs milliards de points à quelques centaines de milliers de points.
Quelle est la taille typique d'un nuage de points LiDAR ?
Il n’y a pas de taille de zone fixe. Cela dépend également de plusieurs facteurs, notamment de l’altitude de vol dans le cas d’un système aéroporté ou basé sur un drone, ainsi que des spécifications du capteur et de la densité de points. Il est possible de scanner de petites zones à l’aide d’un LiDAR basé sur un drone et de grandes zones à l’aide de systèmes de cartographie aéroportés.
À quoi sert un nuage de points LiDAR ?
Les utilisations courantes sont la gestion forestière, les études archéologiques, l’exploration géologique, ainsi que la cartographie topographique, la modélisation d’infrastructures, la planification et le développement urbains.
Quelle est la taille du fichier d'un nuage de points LiDAR ?
La taille du fichier dépend du type de fichier choisi, ainsi que de la zone d’étude, de la densité des points, et du nombre et de la complexité associés à chaque point du nuage de points. En fonction de ces facteurs, un seul fichier peut aller de quelques mégaoctets à plusieurs téraoctets.