Normes de précision LiDAR : Ce que les tests de l’industrie prouvent

La précision LiDAR est l’élément vital d’une acquisition fiable de données spatiales. Le concept de base montre à quel point une mesure LiDAR est proche de la valeur réelle. Lorsque les professionnels discutent de la précision LiDAR, ils l’expriment sous la forme d’une fourchette (±2cm) ou d’un écart-type (3cm à 1σ).
Le domaine LiDAR comporte deux catégories principales de précision : la précision relative et la précision absolue. La précision relative indique la précision des mesures les unes par rapport aux autres au sein d’un même jeu de données. Elle répond à la question suivante : « Quelle est la précision des mesures les unes par rapport aux autres ? Cette précision interne définit les niveaux de confiance lors de la comparaison des points d’un nuage de points, quelle que soit leur position exacte sur la Terre. La précision absolue mesure la correspondance entre les données LiDAR et les emplacements géographiques réels à la surface de la Terre. Elle répond à une question simple : « A quel point mes mesures sont-elles proches des vraies valeurs ?
La comparaison statistique entre les points connus (levés) et les points laser mesurés détermine la précision du LiDAR. L’écart-type et l’erreur quadratique moyenne (EQM) sont des mesures statistiques courantes dans l’industrie. La différence entre les points de contrôle au sol et les élévations LiDAR permet d’évaluer la précision verticale, qui se situe généralement entre 5 et 30 centimètres.
Ces facteurs affectent la précision du LiDAR :
- Composants matériels – chacun ayant ses propres valeurs de précision exprimées sous forme de distance ou d’angle
- Erreurs systématiques dues à un mauvais étalonnage ou à un biais du compas
- Erreurs aléatoires/bruit dans les mesures
- Conditions environnementales affectant la qualité du signal
- Algorithmes de traitement et méthodes de filtrage
Une formule simplifiée permet de calculer la précision globale d’un système LiDAR :
Précision globale = √[(erreur GNSS)² + (erreur de portée LiDAR)² + (portée * tan(erreur INS))² + (portée * tan(erreur LiDAR – INS))²]
La précision diminue à mesure que la distance par rapport au capteur augmente, en raison de l’erreur angulaire de l’INS. Il est donc important de comprendre la plage d’où provient un chiffre de précision donné. Les utilisateurs peuvent obtenir des précisions verticales supérieures à 15 cm à 1 200 m d’altitude dans des conditions optimales.
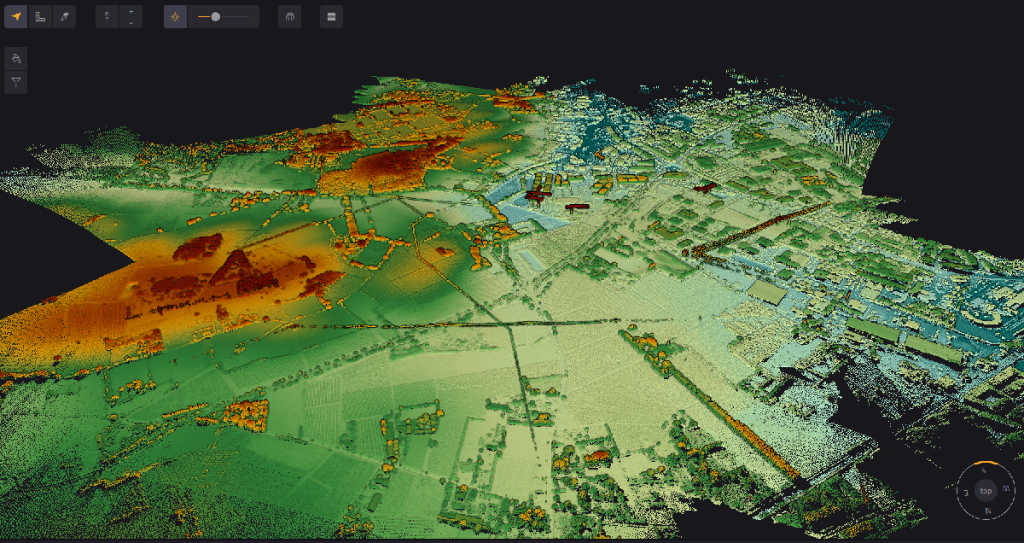
Nuage de points généré par YellowScan CloudStation
Normes de précision LiDAR reconnues par l’industrie
Des normes vieilles de dix ans constituent le fondement de la précision LiDAR dans tous les secteurs d’activité. Ces cadres fournissent des méthodes cohérentes pour mesurer, rapporter et prouver la qualité des données spatiales.
Système de classification de la précision ASPRS
L’American Society for Photogrammetry and Remote Sensing (ASPRS) fournit les normes les plus complètes et les plus accessibles pour évaluer la précision du LiDAR. Les normes de précision positionnelle de l’ASPRS pour les données géospatiales numériques, édition 2, ont été approuvées en août 2023. Cette édition met à jour la première version de 2014 qui a ouvert la voie en matière de directives de cartographie numérique.
La norme révisée apporte plusieurs améliorations importantes :
- Finies les références à un niveau de confiance de 95 % comme mesures de précision
- Les exigences en matière de précision des cibles pour les points de contrôle au sol doivent désormais être doublées au lieu de quadruplées.
- Le nombre minimum de points de contrôle est passé de 20 à 30 pour l’évaluation de la précision.
L’édition 2 exprime désormais la précision horizontale sous forme de RMSEH (erreur linéaire combinée dans la direction radiale) plutôt que sous forme de valeurs RMSEx et RMSEy distinctes. La norme exige une répartition spécifique des points de contrôle, avec au moins 30 points de contrôle répartis uniformément sur les zones de projet.
Normes ISO pour la précision des données géospatiales
L’Organisation internationale de normalisation (ISO) traite de la précision du LiDAR dans sa série ISO/TS 19159. L’ISO/TS 19159-2 couvre spécifiquement « la méthode de capture des données, les relations entre les systèmes de référence de coordonnées et leurs paramètres, ainsi que l’étalonnage des capteurs LiDAR aéroportés ». Ce guide technique normalise les processus d’étalonnage sur le plan géométrique, radiométrique et caractéristique pour les applications dans divers domaines tels que la terre, la glace, la forêt, l’eau et l’atmosphère.
Normes du Comité fédéral des données géographiques (FGDC)
Le FGDC a créé la norme nationale pour la précision des données spatiales (NSSDA). Cette norme utilise l’erreur quadratique moyenne (RMSE) pour estimer la précision de positionnement des données géospatiales. Les tests nécessitent une source indépendante plus précise et au moins 20 points de contrôle répartis sur l’ensemble de la zone géographique.
Le Geospatial Data Act de 2018 a fait du FGDC l’organisation principale chargée d’élaborer des normes en matière de données géospatiales. Les agences fédérales doivent se conformer à ces normes lorsqu’elles collectent ou produisent des données géospatiales. Les agences non fédérales sont encouragées à adopter ces normes pour faciliter le partage des données.
Données géospatiales numériques basées sur la position de la Terre
Comment la précision du LiDAR est-elle testée et vérifiée ?
Les systèmes LiDAR nécessitent des méthodes d’essai rigoureuses qui prouvent qu’ils sont justes pour les mesures de précision relative et absolue. Une image complète vous donnera l’assurance que les données collectées répondent aux spécifications du projet et aux normes industrielles avant d’être utilisées dans des applications critiques.
Méthodes de vérification des points de contrôle au sol
Les points de contrôle au sol (GCP) servent de marqueurs de référence avec des coordonnées connues pour prouver la précision des données LiDAR. Ces points servent de points de rattachement dans les logiciels de traitement. Ils indiquent l’échelle et l’orientation du nuage de points et contribuent à améliorer la qualité globale des données. Les GCP doivent être placés sur un terrain plat ou uniformément incliné, avec des pentes inférieures ou égales à 10 %. Vous devez éviter les artefacts verticaux ou les changements d’altitude soudains.
Les levés cinématiques en temps réel (RTK) constituent le moyen le plus rapide de collecter des GCP. Cette technique nécessite deux récepteurs GNSS : une station de référence statique (base) et un récepteur mobile (rover). La base envoie des données de correction au rover et fournit une précision centimétrique – généralement de 1 à 3 cm – lors de la mise en place des GCP.
Les géomètres doivent distinguer deux types de points de contrôle : Les points de contrôle au sol (GCP) pour l’ajustement des données et les points de contrôle de l’enquête (SCP) uniquement pour les rapports de précision. Les points de contrôle ne modifient jamais la façon dont l’enquête est traitée, ce qui leur permet de rester indépendants pour la validation.
Techniques d’évaluation de la précision relative
La précision relative, également appelée « précision de fauchée à fauchée » ou « cohérence entre les fauchées », indique dans quelle mesure les zones de collecte de données qui se chevauchent correspondent les unes aux autres. Ce contrôle interne de la qualité géométrique porte principalement sur les différences verticales entre les trajectoires de vol qui se chevauchent.
Le processus d’évaluation fait appel à plusieurs méthodes :
- Comparaison basée sur les surfaces : Les surfaces au sol proviennent d’algorithmes point-numérique (PTD) au niveau de chaque ligne de vol. Chaque surface est comparée aux points classés au sol de toutes les lignes de vol qui se chevauchent. Les différences sont enregistrées et résumées.
- Analyse statistique : Vous devez vérifier la cohérence du chevauchement à plusieurs endroits dans les zones non végétalisées. Ces zones ne doivent présenter que des retours simples et des pentes inférieures à 10 degrés. Un fichier de forme polygonale montre la cohérence des recouvrements dans les zones d’échantillonnage. Le fichier comprend des attributs tels que la différence minimale, la différence maximale et les valeurs RMSDz.
Protocoles de mesure de la précision absolue
Les tests de précision absolue comparent les mesures LiDAR à des points de relevé indépendants de plus grande précision. L’équipe compare les élévations du jeu de données LiDAR avec les élévations des points de contrôle à des coordonnées x/y similaires pour l’évaluation de la précision verticale.
Les normes ASPRS stipulent que les tests de précision doivent comporter au moins 20 points de contrôle, bien que les normes les plus récentes en suggèrent 30. Les zones de moins de 500 kilomètres carrés nécessitent au moins 20 points de contrôle de la précision verticale sans végétation (NVA) et 5 points de contrôle de la précision verticale avec végétation (VVA).
L’évaluation de la précision horizontale compare les coordonnées planimétriques de points bien définis avec des coordonnées provenant de sources plus précises. Néanmoins, les points de contrôle levés ne permettent pas d’estimer la précision horizontale absolue des données d’élévation dérivées du LiDAR. La nature éparse des données du nuage de points par rapport à l’imagerie à haute résolution est à l’origine de cette limitation.
Validation croisée avec d’autres systèmes de mesure
La comparaison des données LiDAR avec d’autres technologies de mesure renforce la confiance dans l’évaluation de la précision. Les stations totales sont à la pointe de la validation car elles offrent une meilleure précision que les méthodes GPS. La précision du GPS dépend des distances entre les points de base, du temps d’observation et de la géométrie du satellite.
Un logiciel comme CloudCompare permet de comparer les nuages de points issus de différentes méthodes. Une étude a examiné les nuages de points provenant du LiDAR de l’USGS par rapport aux mesures des stations totales. Les résultats ont montré des différences moyennes de 2,2 pouces en 2D (X,Y) et de 5,9 pouces en 3D (X,Y,Z).
La validation croisée avec la photogrammétrie consiste à traiter la même image avec différentes sources GCP. Le processus s’aligne à l’aide d’outils de paires de points équivalents et ajuste uniquement les paramètres de translation et de lacet pour vérifier les différences d’élévation. Cette méthode permet de vérifier la précision sans avoir besoin de beaucoup d’équipement ou de visites sur le terrain.
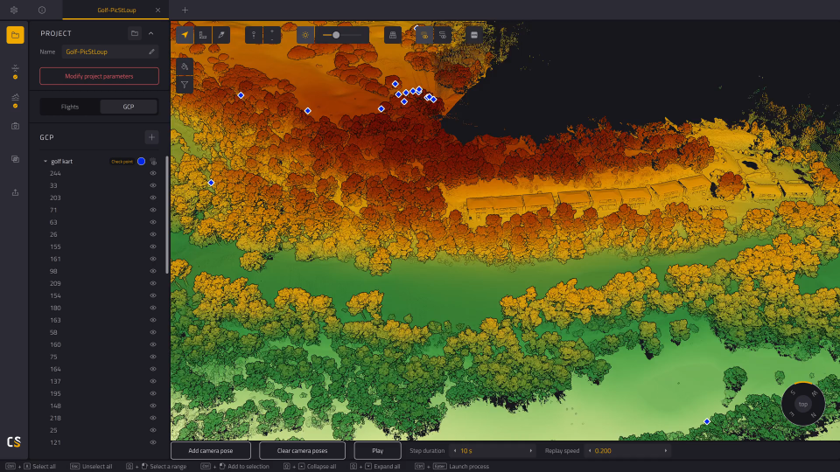
Paramètres GCP de la station cloud
Facteurs clés affectant la précision des scanners LiDAR
La précision des systèmes LiDAR dépend d’interactions complexes entre de multiples variables techniques et environnementales. Les praticiens doivent comprendre ces influences pour obtenir une meilleure précision dans des conditions réelles.
Spécifications et limitations du matériel
La qualité des composants des capteurs influe sur la précision des mesures. Les capteurs LiDAR haut de gamme offrent une meilleure précision que les capteurs de moindre qualité. Le système doit être correctement calibré pour obtenir des données fiables. De petites erreurs d’étalonnage peuvent se propager dans le nuage de points et réduire la précision globale.
Des données GNSS et IMU imprécises affectent directement le géoréférencement du nuage de points final. L ‘attitude de vol (roulis, tangage et cap) des systèmes aéroportés crée des erreurs lorsque les capteurs tournent de manière inattendue pendant la collecte. La hauteur de vol n’affecte pas directement la précision, mais elle modifie la densité des points, ce qui affecte la précision sur les terrains complexes.
Conditions environnementales et atmosphériques
Les conditions météorologiques posent des problèmes majeurs pour les opérations LiDAR. Les signaux laser sont diffusés ou absorbés par la pluie, le brouillard et les particules de poussière, ce qui entraîne de mauvaises mesures. Les mesures de portée restent stables même en cas de fortes pluies, les variations étant généralement inférieures à 20 centimètres. La pluie réduit à la fois l’intensité du retour et les points détectés, en particulier sur les surfaces pavées.
Les variations de la densité de l’air dues à l’humidité affectent l’étalonnage des capteurs. Les températures extrêmes modifient à la fois le fonctionnement des drones et les performances des capteurs. Les systèmes sont confrontés à des problèmes liés à la lumière directe du soleil en raison de son intensité et du chevauchement des longueurs d’onde.
Algorithmes de traitement des données et filtrage
Des algorithmes de filtrage avancés améliorent la précision en débarrassant les nuages de points bruts du bruit, des valeurs aberrantes et des points indésirables. L’affinage des données utilise différentes approches telles que les filtres de grille de voxel, l’élimination des valeurs aberrantes statistiques et l’élimination des valeurs aberrantes de rayon.
Les zones d’altitude variable rendent le filtrage du sol difficile, car les algorithmes ne peuvent pas facilement distinguer les points au sol des autres. Les méthodes simples de filtrage du bruit ne permettent pas de séparer correctement les éléments statiques de l’arrière-plan des objets dynamiques. Les filtres de Kalman et les approches d’apprentissage automatique permettent d’améliorer la précision de la classification pour résoudre ces problèmes.
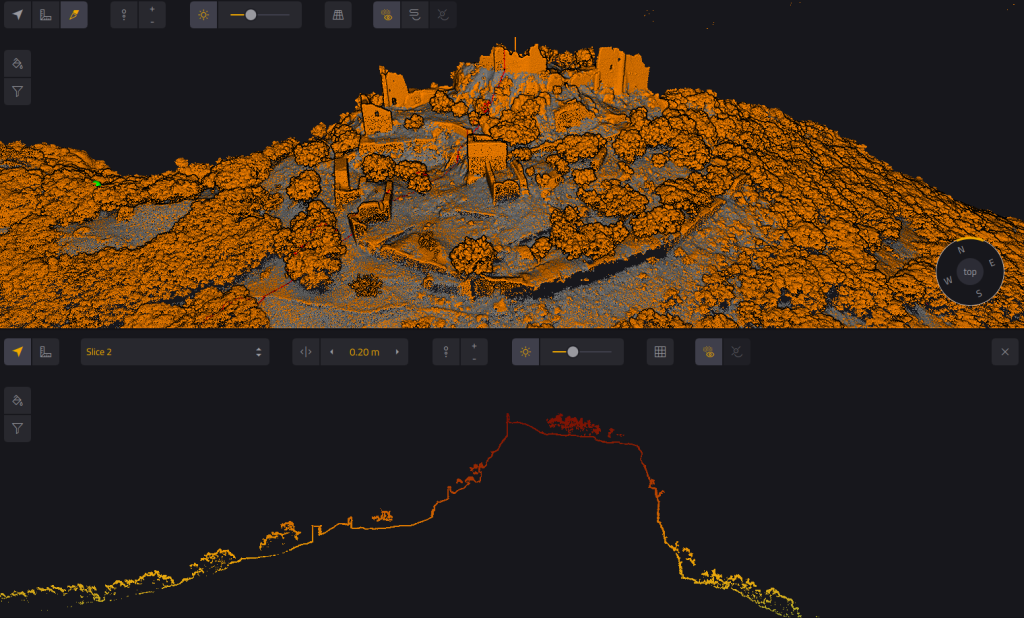
Tranche du château de Montferrand dans le logiciel YellowScan CloudStation
Problèmes courants de précision LiDAR et solutions
Les déploiements LiDAR fonctionnent mieux lorsque les équipes reconnaissent et résolvent les problèmes de précision spécifiques qui peuvent affecter la qualité des données. La technologie a progressé, mais certaines limites fondamentales subsistent. Les équipes doivent y remédier en appliquant des techniques de calibrage et de traitement minutieuses.
Erreurs systématiques et problèmes d’étalonnage
Les erreurs systématiques constituent un défi majeur pour les systèmes LiDAR. Ces écarts de mesure prévisibles nuisent à la précision. Les erreurs se manifestent principalement par un désalignement de l’axe de visée, c’est-à-dire un décalage angulaire entre le capteur LiDAR et le système de coordonnées GPS/INS embarqué. Ce désalignement est à l’origine de la plus grande erreur systématique dans les opérations UAV-LiDAR. L’altitude de vol et l’angle de balayage aggravent encore ses effets.
L’erreur d’étalonnage affecte la reconstruction des nuages de points de deux manières principales dans les systèmes aériens. Les erreurs de visée créent des lacunes entre les lignes de vol qui se chevauchent, ce qui entraîne des valeurs d’altitude incohérentes pour des emplacements au sol similaires. Ces erreurs créent également des distorsions qui s’accentuent à mesure que la distance par rapport au capteur augmente.
Les équipes utilisent deux approches principales pour un étalonnage efficace :
- L’étalonnage intrinsèque porte sur les paramètres internes du capteur LiDAR, y compris l’alignement du faisceau laser, en utilisant des cibles d’étalonnage de dimensions connues.
- L’étalonnage extrinsèque associe le LiDAR à d’autres capteurs, tels que des caméras ou des radars, afin de garantir une fusion précise des données.
Des études montrent que des techniques d’étalonnage appropriées peuvent réduire considérablement les erreurs de reprojection, de rotation et de distance. Oui, il est courant que les spécialistes utilisent un logiciel d’alignement des bandes. Ce logiciel permet de corriger les erreurs systématiques restantes en ajustant la position et les angles tout au long de la mission.
Erreurs aléatoires et stratégies de réduction du bruit
Les erreurs aléatoires diffèrent des erreurs systématiques. Elles proviennent de fluctuations imprévisibles dans les processus de mesure. Les principales sources sont le bruit quantique (bruit de grenaille) dû à la nature discrète de la lumière, le bruit thermique dû au mouvement aléatoire des électrons et le bruit excessif des tubes photomultiplicateurs lors de la détection analogique.
Le bruit des nuages de points révèle des erreurs aléatoires. Vous pouvez vous en rendre compte en examinant les valeurs moyennes des pentes obtenues à partir de LiDAR à pleine résolution. Ces valeurs semblent anormalement élevées, même sur un terrain plat. Cela s’explique par le fait que la précision verticale (généralement de 12 à 15 centimètres) crée des différences de hauteur aléatoires de 24 à 30 centimètres entre des points proches. Des points distants d’un mètre seulement sur le plan horizontal créent ce que les experts en traitement du signal appellent du « bruit à haute fréquence ».
Les équipes peuvent réduire le bruit grâce à
- Filtrage statistique pour repérer et supprimer les valeurs aberrantes sur la base des modèles de distribution spatiale
- Filtrage de la taille des fenêtres pour améliorer le rapport entre la densité de l’échantillon horizontal et la précision verticale.
- Méthode NSF (noise scale factor) pour estimer l’erreur aléatoire sans les effets de la variabilité atmosphérique
Dégradation de la précision dans les environnements difficiles
Les conditions réelles affectent les performances du LiDAR en raison de divers facteurs environnementaux. La pluie, le brouillard et la poussière diffusent ou absorbent les faisceaux laser, ce qui entraîne des données incomplètes ou erronées. Le brouillard affecte la précision en raison de la diffusion des particules d’eau. La pluie modifie à la fois l’intensité du signal et la densité des points.
Les surfaces réfléchissantes posent des problèmes particuliers aux systèmes LiDAR. Les faisceaux lumineux sont déformés par les objets de type miroir et les parois en verre, ce qui rend impossible une mesure précise de la distance. Ces distorsions provoquent des erreurs de localisation et de cartographie simultanées (SLAM). Cela augmente les risques d’accident dans les applications de véhicules autonomes.
Les spécialistes utilisent plusieurs stratégies pour améliorer les performances dans des conditions difficiles :
- Algorithmes adaptatifs qui s’ajustent aux interférences environnementales en temps réel
- Fusion de plusieurs capteurs combinant le LiDAR avec des caméras, des radars et le GPS
- Techniques de filtrage avancées telles que l’élimination des valeurs aberrantes de faible intensité (LIOR) et l’élimination des valeurs aberrantes de distance et d’intensité (DDIOR)

LiDAR YellowScan monté sur un drone à voilure fixe, balayant une mer de nuages.
L’avenir des normes de précision LiDAR
Les normes de précision LiDAR continuent de progresser avec les avancées technologiques et l’expansion des applications. L’American Society for Photogrammetry and Remote Sensing (ASPRS) a publié sa deuxième édition des Positional Accuracy Standards for Digital Geospatial Data (normes de précision positionnelle pour les données géospatiales numériques), qui apporte les changements les plus importants aux cadres précédents. Ces changements comprennent le renommage des termes RMSE – RMSEz devient RMSEV et RMSEx/RMSEy se combine en RMSEH. La nouvelle norme ne fait plus référence au niveau de confiance de 95 % comme mesure de précision et a des exigences moins strictes pour les points de contrôle au sol.
Les développements technologiques de pointe ont permis des améliorations sans précédent en matière de précision. Les systèmes LiDAR à effet Doppler cohérent offrent aujourd’hui des précisions de mesure supérieures à 0,8 centimètre par seconde pour la vitesse et à 0,8 mètre pour la portée. La prochaine génération de capteurs permettra d’atteindre une précision de l’ordre du centimètre à de plus grandes distances, ce qui améliorera les applications dans les domaines de l’arpentage, de la construction et de la navigation autonome.
Le LiDAR à semi-conducteurs apporte un changement fondamental vers une meilleure fiabilité en éliminant les pièces mobiles. Cette avancée rend les systèmes plus durables et améliore les capacités de cartographie 3D dans la vie réelle. Plusieurs fabricants ont annoncé des technologies qui atteignent une précision de 99,9 % dans le suivi des objets et de 98,9 % dans la reconnaissance des objets en utilisant uniquement le LiDAR.
L’intégration de l’IA redéfinit ce que le LiDAR peut réaliser en termes de précision. Les algorithmes pilotés par l’IA automatisent la reconnaissance des objets, améliorent le filtrage des nuages de points et optimisent la prise de décision à la minute près. Ces améliorations permettent aux systèmes de mieux gérer les conditions météorologiques difficiles telles que la pluie et le brouillard, une solution ayant doublé la distance détectable de 20 à 40 mètres en cas de fortes pluies.
Les futures normes incluront probablement des capacités LiDAR multi-spectrales, car ces systèmes capturent des données sur plusieurs longueurs d’onde afin de mieux classer les matériaux. Grâce aux tendances à la miniaturisation, des systèmes de haute précision deviennent disponibles dans un grand nombre d’industries.
La précision des futurs systèmes LiDAR dépendra toujours des paramètres d’étalonnage, de la densité des points, des paramètres de vol et des techniques de traitement des données. La recherche se concentre actuellement sur l’amélioration de la portée, de la résolution, de l’exécution en temps réel, de l’efficacité énergétique et d’une intégration plus poussée de l’IA.
Questions fréquemment posées
Comment la précision du LiDAR est-elle généralement évaluée ?
La précision du LiDAR est généralement évaluée à l’aide de points de contrôle au sol (GCP) dont les coordonnées sont connues. Les géomètres comparent les mesures LiDAR à ces points relevés indépendamment, ce qui nécessite généralement un minimum de 20 à 30 points de contrôle répartis sur la zone du projet. Des mesures statistiques telles que l’erreur quadratique moyenne (RMSE) sont utilisées pour quantifier la précision.
Quelle précision de portée les systèmes LiDAR modernes peuvent-ils atteindre ?
Les systèmes LiDAR modernes peuvent atteindre une précision impressionnante. Les capteurs haut de gamme peuvent atteindre des précisions de 0,5 à 10 mm par rapport au capteur, avec des précisions cartographiques allant jusqu’à 1 cm horizontalement et 2 cm verticalement. Certains systèmes avancés atteignent même une précision de l’ordre du centimètre à de plus grandes distances.
Quels sont les formats de fichiers standard pour le stockage des données LiDAR ?
Les formats de fichiers LAS (LASer) et LAZ (LAS compressé) sont largement reconnus comme des normes industrielles pour le stockage et le partage des données LiDAR. Ces formats vectoriels stockent efficacement les données des nuages de points et sont compatibles avec de nombreux outils logiciels, ce qui les rend essentiels pour l’interopérabilité dans les secteurs de l’arpentage et de la cartographie.
Comment les facteurs environnementaux affectent-ils la précision du LiDAR ?
Les conditions environnementales ont un impact significatif sur les performances du LiDAR. Des facteurs tels que la pluie, le brouillard, la poussière et les températures extrêmes peuvent diffuser ou absorber les signaux laser, dégradant ainsi la précision des mesures. Par exemple, de fortes pluies peuvent réduire l’intensité des retours et le nombre de points détectés, en particulier lors du balayage de surfaces telles que les chaussées.
Quel rôle joue l'IA dans l'amélioration de la précision du LiDAR ?
L’intelligence artificielle améliore de plus en plus les capacités de précision du LiDAR. Les algorithmes pilotés par l’IA automatisent la reconnaissance des objets, améliorent le filtrage des nuages de points et optimisent la prise de décision en temps réel. Ces progrès permettent aux systèmes de compenser les conditions environnementales difficiles, certaines solutions doublant les distances détectables dans des conditions météorologiques défavorables telles que de fortes pluies.