Explicación de la navegación LiDAR: De los Principios Básicos a las Aplicaciones Avanzadas

El LiDAR(Light Detection and Ranging) es el alma de los sistemas de navegación modernos. Proporciona mediciones espaciales precisas mediante un principio operativo elegante pero potente. A diferencia de las tecnologías de detección pasiva, el LiDAR emite activamente impulsos láser hacia los objetos y mide el tiempo de reflexión de vuelta al sensor. Esta medición del tiempo de vuelo ayuda a calcular distancias exactas mediante la fórmula d = (c × Δt) / 2, donde c representa la velocidad de la luz y Δt indica el retardo temporal.
El poder del LiDAR en la navegación proviene de saber captar más rápidamente los datos medioambientales. Los sistemas avanzados pueden tomar millones de muestras por segundo. Este muestreo de alta frecuencia crea densas nubes de puntos que representan espacios tridimensionales con notable detalle.
El corazón de un sistema LiDAR está formado por varios componentes críticos que trabajan juntos. El emisor láser genera impulsos cortos y focalizados que se dirigen hacia los objetos objetivo, mientras que el fotodetector capta la luz retrodispersada. El sistema utiliza mecanismos de temporización precisos para medir los pequeños retardos entre la emisión y la detección. Las aplicaciones de navegación necesitan estos datos sensoriales anclados en el espacio físico mediante la integración con sistemas de posicionamiento.
Sí, es esencial afinar la coordinación entre la unidad de escaneado láser y el hardware de navegación para que el LiDAR funcione. Los Sistemas Globales de Navegación por Satélite (GNSS) proporcionan coordenadas geográficas (latitud, longitud, altura). Una Unidad de Medición Inercial (IMU) determina la orientación del sensor mediante mediciones de cabeceo, balanceo y guiñada. Esta fusión tecnológica transforma las mediciones brutas de distancia en coordenadas tridimensionales georreferenciadas.
La navegación LiDAR aporta ventajas únicas. Funciona independientemente de las condiciones de iluminación ambiental. La tecnología ofrece una precisión centimétrica, de entre 15 y 25 cm, lo que la hace perfecta para aplicaciones de cartografía medioambiental detallada.
La navegación LiDAR tiene sus límites. Las señales de esta tecnología son absorbidas por el agua, el asfalto y las superficies alquitranadas. La niebla y las nubes densas pueden reducir el rendimiento al dispersar los pulsos láser antes de alcanzar sus objetivos. A pesar de ello, el LiDAR sigue siendo crucial en los ámbitos de la navegación, desde los vehículos autónomos hasta la cartografía de drones y el guiado de robots en interiores.
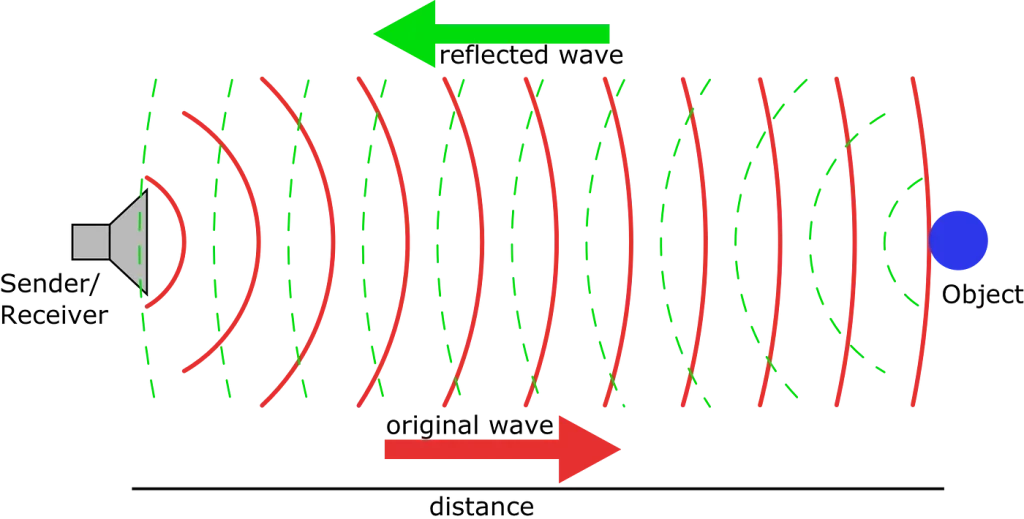
Principio básico de la medición de distancias mediante ondas reflejadas
Cómo captan y procesan los datos medioambientales los sistemas LiDAR
Los sistemas LiDAR modernos utilizan mecanismos avanzados que convierten los datos medioambientales brutos en información útil para la navegación. Estos sistemas funcionan mediante principios de medición exactos y técnicas de procesamiento especializadas para convertir la luz reflejada en representaciones espaciales precisas.
Principios de medición del tiempo de vuelo en los LiDAR modernos
El principio operativo básico de la tecnología LiDAR se centra en la medición del tiempo de vuelo (ToF). Este enfoque calcula las distancias mediante la fórmula d = (c × Δt)/2, donde c representa la velocidad de la luz y Δt muestra el retardo de tiempo entre la emisión y la recepción. Los impulsos láser rebotan en el sensor tras chocar con los objetos, y el sensor mide con precisión este intervalo de tiempo.
Los sistemas actuales utilizan dos métodos principales de ToF. El tiempo de vuelo directo (dToF) mide el tiempo de recorrido real de los impulsos láser y convierte esta duración en mediciones de distancia. Este método proporciona mediciones de distancia fiables y de baja potencia, y sigue siendo accesible para más personas debido a la fiabilidad de sus datos y a su funcionamiento económico. El tiempo de vuelo indirecto (iToF) utiliza fuentes láser de amplitud modulada y mide la diferencia de fase entre la luz transmitida y la reflejada. A continuación, el sistema convierte este cambio de fase en tiempo y distancia.
LiDAR de impulsos frente a onda continua: diferencias técnicas
Los sistemas de pulso y de onda continua representan dos enfoques distintos del funcionamiento del LiDAR. El LiDAR de pulsos lanza ráfagas cortas de alta intensidad que duran sólo nanosegundos o microsegundos. Estos sistemas alcanzan elevados picos de potencia manteniendo baja la potencia media. La energía concentrada limpia eficazmente los contaminantes y funciona con mejor eficiencia eléctrica porque los pulsos emiten de forma intermitente.
El LiDAR de onda continua (CW) crea un haz de luz ininterrumpido. Los sistemas de onda continua de frecuencia modulada (FMCW) utilizan haces de luz láser «chirpeados» que emiten continuamente con frecuencias que cambian cíclicamente. Los sistemas FMCW tienen una ventaja clave: miden la velocidad del objeto directamente a través del efecto Doppler. Esto elimina la necesidad de múltiples mediciones que suelen requerir los sistemas ToF.
Generación de nubes de puntos 3D a partir de datos LiDAR sin procesar
Los datos LiDAR brutos consisten en puntos no filtrados ni estructurados que se muestran como datos tabulares con coordenadas y atributos como valores de reflectancia. El procesamiento convierte esta información bruta en nubes de puntos 3D estructuradas que representan con precisión los entornos terrestres.
El proceso de generación sigue varios pasos clave. El filtrado y la limpieza de la nube de puntos elimina los puntos incorrectos mediante métodos como el filtrado basado en la densidad, que localiza y elimina puntos basándose en la evaluación de la densidad local. La clasificación de puntos etiqueta los puntos individuales como suelo, vegetación, edificios u otros elementos. El modelado de superficies crea triángulos y polígonos entre puntos cercanos para generar Modelos Digitales de Elevación (MDE) y Modelos Digitales de Superficie (MDS).
Los datos suelen utilizar el formato de archivo LAS estándar del sector (.las) o su variante comprimida (.laz). Estos formatos almacenan y transfieren eficazmente millones de puntos de escaneados LiDAR detallados.
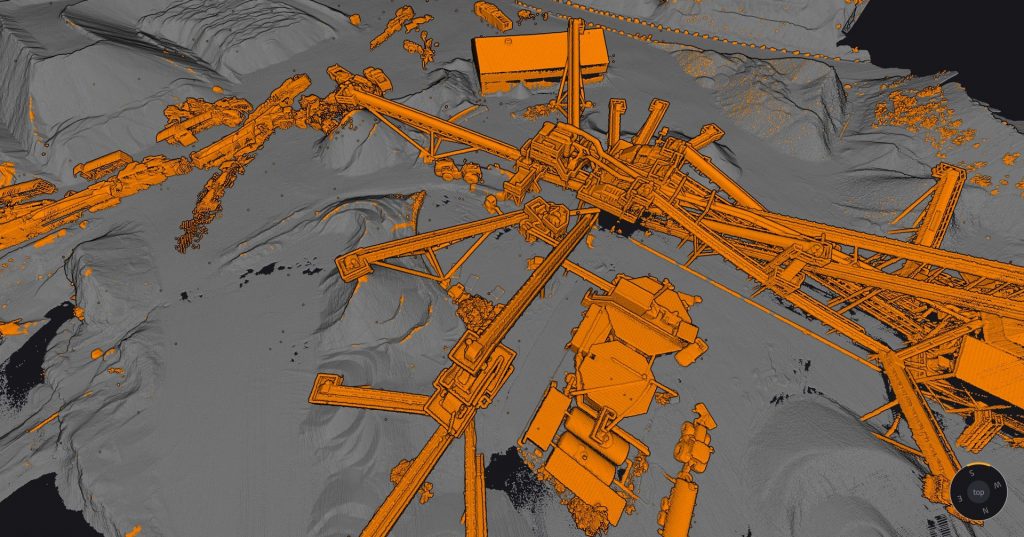
Polígono industrial escaneado con LiDAR para cartografía estructural
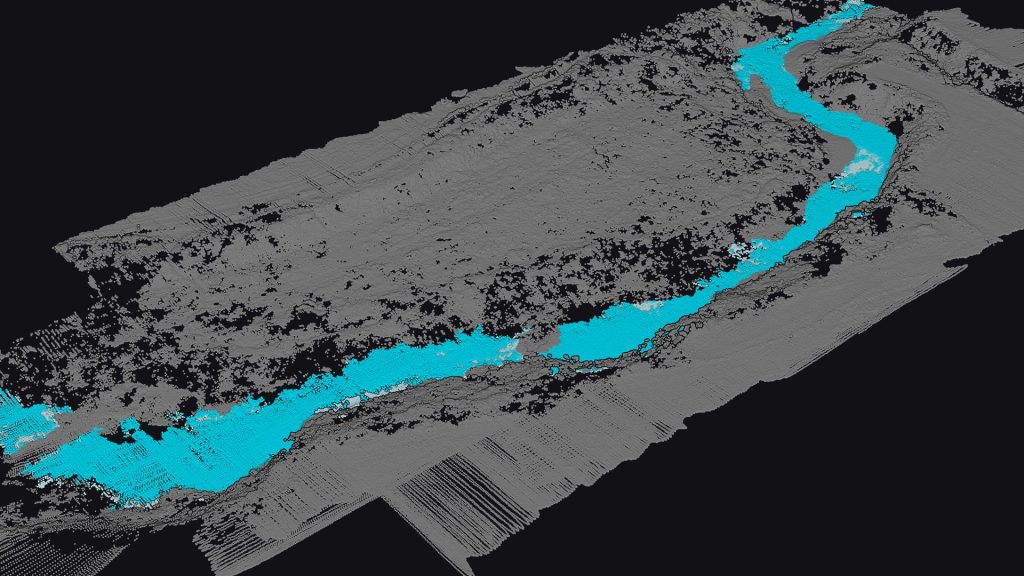
Cartografía de cauces utilizando la clasificación de nubes de puntos LiDAR
Componentes básicos de los sistemas de navegación LiDAR
Los sistemas de navegación LiDAR necesitan cuatro componentes de hardware esenciales que trabajen juntos para percibir e interpretar con precisión el entorno circundante. Estos componentes tienen funciones especializadas que ayudan a crear mapas espaciales precisos para la navegación robótica y los sistemas autónomos.
Emisores y receptores láser: Especificaciones técnicas
La fuente láser es el núcleo de todo sistema LiDAR y genera impulsos de energía para cartografiar el entorno. La mayoría de los sistemas LiDAR terrestres utilizan longitudes de onda del infrarrojo cercano de 960-1550 nm, mientras que los sistemas acuáticos necesitan fuentes visibles de 532 nm para penetrar en el agua.
Los subsistemas receptores contienen detectores que convierten los fotones en corriente eléctrica. Los sistemas de navegación LiDAR actuales utilizan tres tecnologías principales de detectores:
- Fotodiodos de avalancha (APD): Funcionan en modo lineal por debajo de la tensión de ruptura para la detección estándar
- Diodos de avalancha de fotón único (SPAD): Funcionan en modo Geiger por encima de la tensión de ruptura y detectan fotones individuales con una sensibilidad excepcional
- Fotomultiplicadores de silicio (SiPM): Conectan varios SPAD en paralelo para detectar el recuento total de fotones
La sensibilidad del detector está relacionada con la relación señal/ruido y la capacidad de alcance máximo. El sistema necesita una electrónica de sincronización precisa emparejada con una detección sensible de fotones para determinar la distancia a los obstáculos de navegación.
Mecanismos de exploración: LiDAR mecánico frente a LiDAR de estado sólido
Los sistemas LiDAR mecánicos utilizan piezas móviles, como espejos giratorios o conjuntos completos, para escanear su entorno. Estas piezas móviles permiten rangos de exploración amplios y dinámicos de hasta 360° en horizontal y capturan grandes áreas con gran detalle. En cambio, los LiDAR de estado sólido guían los haces láser únicamente mediante métodos electrónicos, lo que elimina las piezas móviles para mejorar la fiabilidad.
Las principales tecnologías de estado sólido son
- 1. MEMS (Sistemas microelectromecánicos): Utilizan espejos diminutos que se mueven para escanear el entorno y son habituales en aplicaciones de automoción
- 2. OPA (Optical Phased Arrays): Son verdaderas soluciones de estado sólido que ajustan la fase de la luz para dirigir los haces sin movimiento físico
Los sistemas LiDAR híbridos combinan ambas tecnologías. Utilizan la dirección electrónica para una cobertura rápida, al tiempo que añaden elementos mecánicos para ampliar el alcance y mejorar la resolución. Los sistemas de estado sólido son más fiables y compactos, pero los LiDAR mecánicos proporcionan mejor alcance y detalle cuando necesitas una cartografía medioambiental detallada.
Hardware de procesamiento de señales para navegación en tiempo real
La arquitectura de procesamiento de señales es crucial para la navegación LiDAR. Los sistemas modernos combinan una CPU, un sistema en chip (SoC) y una matriz de puertas programables en campo (FPGA) para gestionar los cálculos de tiempo de vuelo y crear nubes de puntos. Estos subsistemas de procesamiento afrontan retos clave como la diafonía de la señal, la saturación, el filtrado del ruido y los límites de la frecuencia de muestreo.
Las aplicaciones de navegación necesitan una toma de decisiones inmediata. La arquitectura de procesamiento ejecuta algoritmos avanzados que realizan el ajuste de curvas de Gauss, el promedio de formas de onda, el filtrado digital y la deconvolución para extraer datos medioambientales significativos. Los vehículos autónomos necesitan que este procesamiento se produzca rápidamente para navegar con seguridad a velocidades operativas.
Consideraciones sobre la potencia y la gestión térmica
La gestión del calor es un reto importante en los sistemas de navegación LiDAR. Los láseres funcionan con una eficiencia de aproximadamente el 10%, y el 90% de la energía de entrada se convierte en calor en lugar de luz. Esta carga de calor afecta a varios componentes del sistema:
- Rendimiento del diodo láser: Demasiado calor provoca desplazamientos de longitud de onda, menor rendimiento y una degradación más rápida
- Función del detector: El ruido térmico reduce la relación señal/ruido y la precisión
- Componentes ópticos: Los cambios de temperatura distorsionan los haces y provocan desalineaciones
Una buena gestión del calor utiliza métodos preventivos y de transferencia. La prevención se centra en un diseño cuidadoso de la carcasa y la elección del material, mientras que los métodos de transferencia crean vías conductoras desde las fuentes de calor hasta las superficies externas. Los sistemas LiDAR de estado sólido pueden reducir su aumento máximo de temperatura alrededor de un 20% mediante un barrido optimizado del haz con una sencilla refrigeración por aire forzado.

Sistema LiDAR YellowScan Navigator para cartografía geoespacial avanzada
Algoritmos SLAM: El cerebro de la navegación LiDAR
El software que interpreta los datos LiDAR impulsa a todos los robots autónomos cuando se mueven por entornos complejos. Los algoritmos SLAM actúan como el cerebro que ayuda a las máquinas a comprender su entorno y conocer su posición exacta.
Fundamentos de localización y mapeo simultáneos
La navegación robótica se enfrenta al clásico problema del huevo o la gallina: ¿cómo pueden las máquinas crear mapas de espacios desconocidos y al mismo tiempo averiguar dónde se encuentran en ese mismo mapa? Este reto es la base de los sistemas de navegación autónoma que vemos en los coches autoconducidos y en los robots de almacén.
El SLAM tiene dos procesos principales que funcionan conjuntamente. El paso de predicción estima dónde estará el robot a continuación basándose en su movimiento y posición actual. A continuación, el paso de corrección afina esta estimación utilizando sensores LiDAR que miden las distancias a los objetos cercanos. Estos pasos se repiten continuamente para mejorar la precisión de la posición y construir mejores mapas.
Los sistemas SLAM actuales funcionan de dos maneras. Algunos utilizan métodos de filtrado como los Filtros de Kalman Extendidos y los filtros de partículas para calcular las posiciones probables del robot y mapear las características. Otros adoptan un enfoque basado en gráficos, creando redes que muestran cómo se relacionan los puntos de referencia entre sí en el espacio. Los métodos gráficos suelen funcionar mejor en entornos complejos.
Extracción de características de las nubes de puntos LiDAR
Los datos LiDAR en bruto necesitan ser procesados antes de que los algoritmos SLAM puedan utilizarlos. La extracción de características convierte las nubes de puntos dispersas en patrones y puntos de referencia que los robots pueden utilizar como puntos de referencia.
El SLAM LiDAR busca formas geométricas en nubes de puntos, a diferencia de los sistemas de cámara que analizan píxeles. Las características clave que encuentra incluyen:
- Bordes y planos: Formas geométricas naturales que permanecen estables entre exploraciones
- Esquinas y superficies distintas: Marcadores únicos que ayudan a alinear las distintas vistas
- Segmentación del terreno: Diferenciar el terreno llano de los obstáculos
Los ingenieros utilizan diferentes métodos para encontrar estas características. Los enfoques sencillos utilizan operaciones matemáticas para detectar patrones, mientras que el crecimiento de regiones combina puntos similares en objetos. Técnicas avanzadas como RANSAC ayudan a identificar superficies planas en nubes de puntos.
Una buena detección de características hace que el SLAM funcione mejor. Los ingenieros deben encontrar el equilibrio adecuado entre las características distintivas y el procesamiento rápido. Este equilibrio es más importante cuando los robots necesitan actualizaciones en fracciones de segundo para moverse con seguridad.
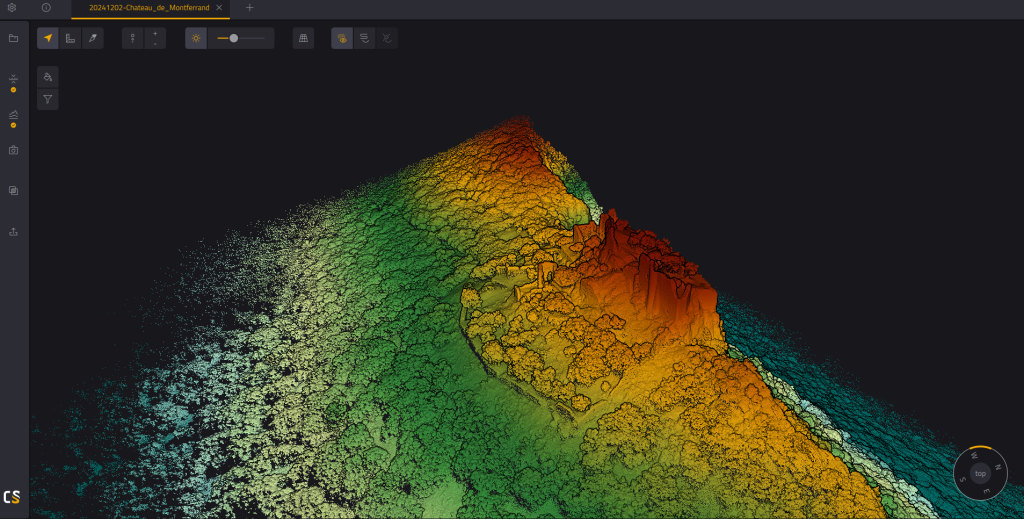
Nube de puntos 3D del castillo de Montferrand mostrada en CloudStation
Aplicaciones avanzadas del LiDAR en la navegación robótica
Los sistemas LiDAR han ido más allá de la teoría para permitir la navegación autónoma terrestre en diversos entornos. Estos versátiles sistemas de detección ayudan a las máquinas a ver, interpretar y dirigirse a través de entornos complejos con notable precisión, desde calles urbanas muy transitadas hasta espacios interiores sin GPS.
Sistemas de percepción de vehículos autónomos
El LiDAR es el alma de la percepción de los vehículos autónomos (AV) modernos, que permite modelar el entorno con precisión incluso en condiciones difíciles. Los sistemas LiDAR de automoción actuales pueden detectar y clasificar múltiples objetos en movimiento a la vez, incluidos peatones, ciclistas y otros vehículos. Esta clasificación ayuda a tomar decisiones de navegación seguras en escenarios de tráfico complejos.
El sistema funciona muy bien en entornos con poca luz y nocturnos porque el LiDAR no necesita luz ambiental para funcionar. Su seguimiento de objetos en vivo hace que los vehículos sean más conscientes de su entorno, especialmente en condiciones difíciles como poca luz o mal tiempo.
La integración de LiDAR en el automóvil requiere tanto la colocación física como algoritmos de software inteligentes. Estos algoritmos procesan los datos del sensor y extraen información útil sobre la detección, clasificación y seguimiento de objetos. Los desarrolladores suelen combinar LiDAR con cámaras, radares y GPS para construir sistemas de percepción completos que compensen las limitaciones de los sensores individuales.
Navegación de robots en interiores en entornos sin GPS
Las soluciones basadas en LiDAR destacan en el posicionamiento de robots móviles con una precisión impresionante dentro de edificios donde la navegación por satélite no funciona bien. Los sistemas modernos pueden determinar la posición absoluta con una precisión de 2 cm utilizando mapas 3D como referencias geométricas. Esta precisión es inestimable en almacenes, fábricas y otros entornos industriales que necesitan una navegación exacta.
La navegación LiDAR en interiores utiliza algoritmos de registro para alinear las observaciones actuales con los mapas geométricos 3D. Esta alineación se produce mediante algoritmos de coincidencia de características y algoritmos de puntos más cercanos iterativos (ICP). Estas técnicas reducen la distancia punto a punto entre las mediciones LiDAR y los mapas de referencia, lo que permite un posicionamiento preciso sin señales GPS.
La navegación en el interior de los edificios es un reto, porque los sistemas deben procesar grandes mapas de zonas considerables y, al mismo tiempo, hacer frente a personas en movimiento o muebles desplazados. Las buenas soluciones deben procesar datos 3D más de 20 veces por segundo para ofrecer actualizaciones frecuentes de la posición.
Cartografía aérea con drones y evitación de obstáculos
Los sistemas LiDAR montados en drones han remodelado la cartografía del terreno al captar datos topográficos detallados de forma eficiente. Los sistemas avanzados pueden recoger hasta 1 millón de puntos por segundo, lo que crea modelos digitales de elevación (MDE) de alta resolución necesarios para el análisis y la planificación medioambientales.
El LiDAR cumple dos funciones en el vuelo autónomo: la cartografía del entorno y la evitación de obstáculos. La función de evitación de obstáculos utiliza tres módulos: percepción del entorno, procesamiento de algoritmos y control del movimiento. Este sistema combinado ayuda a los drones a detectar posibles colisiones y a tomar medidas evasivas por sí mismos.
Los drones equipados con LiDAR funcionan excepcionalmente bien para inspecciones especializadas, como la evaluación de torres de telefonía móvil, la documentación de escenas de accidentes y la vigilancia agrícola. Estas plataformas pueden trabajar con seguridad en entornos difíciles, al tiempo que recopilan datos espaciales precisos que serían peligrosos para los humanos.
Aplicaciones de navegación LiDAR marinas y subacuáticas
Los sistemas LiDAR batimétricos son adaptaciones especiales hechas para entornos submarinos. Estos sistemas utilizan frecuencias que pueden penetrar en el agua, normalmente luz verde con una longitud de onda de 532 nm, en lugar del infrarrojo cercano que se utiliza en tierra. Esta luz especial cartografía los ríos claros y la batimetría costera poco profunda desde el aire, lo que elimina la arriesgada topografía submarina.
Las aplicaciones subacuáticas van más allá de la medición de la profundidad e incluyen la cartografía detallada del hábitat bentónico para estudios de ecología marina. Los sistemas batimétricos avanzados pueden medir profundidades de hasta 25 metros con una claridad excepcional.

Calle urbana muy transitada (© Unsplash)

Estudios de ecología marina (© Unsplash)
Puntos clave de la tecnología de navegación LiDAR
Principales conclusiones y perspectivas de futuro
La tecnología LiDAR es el alma de los modernos sistemas de navegación autónoma. Combina mediciones exactas con el procesamiento inteligente de datos. LiDAR ayuda a las máquinas a crear mapas detallados de su entorno y a conocer su posición mediante principios de tiempo de vuelo y algoritmos SLAM avanzados.
Esta versátil tecnología brilla en muchos ámbitos diferentes. Los coches autoconducidos utilizan LiDAR para detectar y clasificar objetos al instante. Los robots de interior se guían con asombrosa precisión incluso sin GPS. El LiDAR demuestra su valía en tareas especializadas como la cartografía de terrenos submarinos.
Los nuevos avances técnicos ayudan a resolver viejos problemas. Los sistemas de estado sólido funcionan de forma más fiable que sus homólogos mecánicos. Un mejor procesamiento de la señal ayuda a las máquinas a ver a través de las interferencias atmosféricas. Estas mejoras dan lugar a herramientas de navegación más potentes y eficaces para todo tipo de aplicaciones.
El futuro de la navegación LiDAR parece brillante. Las nuevas tecnologías, como los phased arrays ópticos y los algoritmos SLAM más inteligentes, redefinen los límites de los sistemas autónomos. Los ingenieros y desarrolladores que trabajan con robots, coches autónomos y cartografía medioambiental deben comprender estos conceptos básicos.
La navegación LiDAR evoluciona más rápido que nunca a medida que la innovación técnica impulsa los usos en la vida real. Un hardware mejor se une a algoritmos más inteligentes para crear nuevas posibilidades de navegación autónoma en tierra, bajo el agua y en el aire.
Preguntas frecuentes
¿Cuál es el principio básico de la tecnología LiDAR?
La tecnología LiDAR funciona según el principio de medición del tiempo de vuelo. Emite impulsos láser y mide el tiempo que tarda la luz en reflejarse en los objetos, lo que permite calcular con precisión la distancia y cartografiar el entorno.
¿Cómo contribuye el LiDAR a la navegación autónoma?
El LiDAR permite la navegación autónoma creando nubes de puntos 3D detalladas del entorno. Estas nubes de puntos se procesan mediante algoritmos SLAM, lo que permite a los robots y vehículos cartografiar simultáneamente su entorno y determinar su posición dentro de ese mapa.
¿Cuáles son los componentes clave de un sistema de navegación LiDAR?
Un sistema de navegación LiDAR consta de emisores y receptores láser, mecanismos de exploración (mecánicos o de estado sólido), hardware de procesamiento de señales y sistemas de gestión de la energía. Estos componentes trabajan juntos para captar, procesar e interpretar los datos medioambientales con fines de navegación.
¿Cómo se comporta el LiDAR en diferentes entornos?
El LiDAR es versátil en diversos entornos. Destaca en vehículos autónomos para la detección de objetos, navegación en interiores en espacios sin GPS, cartografía aérea con drones e incluso aplicaciones submarinas mediante sistemas LiDAR batimétricos especializados.
¿Cuáles son algunas limitaciones de la tecnología LiDAR?
Aunque es muy eficaz, el LiDAR tiene algunas limitaciones. Puede experimentar absorción de señal en determinadas superficies como el agua y el asfalto, y su rendimiento puede degradarse en condiciones meteorológicas adversas, como niebla espesa o nubosidad. Además, el coste de los sistemas LiDAR de alta calidad puede ser una limitación para algunas aplicaciones.