Estudios batimétricos en Rumanía con YellowScan Navigator

Desafío
Desde la erosión costera a la vigilancia de presas, los estudios batimétricos en Rumanía presentan un conjunto único de retos medioambientales y logísticos. En el Mar Negro, la turbidez del agua es elevada y las señales GNSS suelen ser inestables, condiciones que suelen dificultar la precisión de las herramientas batimétricas tradicionales. Los lugares del interior, como ríos y presas, presentan sus propias complejidades, como fuertes corrientes, terraplenes escarpados o accesibilidad limitada.
Para obtener la información necesaria para la supervisión de infraestructuras, la investigación arqueológica y la modelización de inundaciones, los equipos de topografía necesitaban una solución que pudiera funcionar en entornos difíciles y, al mismo tiempo, proporcionara datos 3D georreferenciados de alta calidad.

YellowScan Navigator, un sistema LiDAR topográfico-batimétrico, montado en la Tundra 2
Solución
Ciprian Iorga, de La Orizont, y Eduard Năstase, del Instituto Nacional de Física de la Tierra, recurrieron a una combinación de sistemas YellowScan LiDAR para afrontar estos retos. Para cartografiar el terreno submarino, desplegaron el YellowScan Navigator, un sistema LiDAR batimétrico basado en UAV y diseñado para operar en aguas poco profundas y turbias. Para complementar los datos batimétricos y captar una cobertura topográfica completa, se utilizaron el Surveyor Ultra (V2) y el Vx20-300 en el mismo emplazamiento o en emplazamientos adyacentes, especialmente cuando la vegetación densa o el terreno variado requerían una mayor densidad de puntos y precisión.
Juntos, estos sistemas permitieron una cobertura completa, bajo el agua y en la superficie, sin comprometer la calidad de los datos ni la eficacia de la misión.
Había tres misiones diferentes:
1- Costa del Mar Negro (Mangalia – Playa de Venus)
En este proyecto de vigilancia costera, el equipo se centró en cartografiar zonas propensas a la erosión, combinando pantano, playa, entorno marino poco profundo e infraestructuras artificiales. Utilizando el YellowScan Navigator, pudieron escanear profundidades de hasta 5-6 metros, incluso en condiciones de gran turbidez. Los datos batimétricos resultantes sirvieron de apoyo a la planificación de infraestructuras y la gestión del litoral.
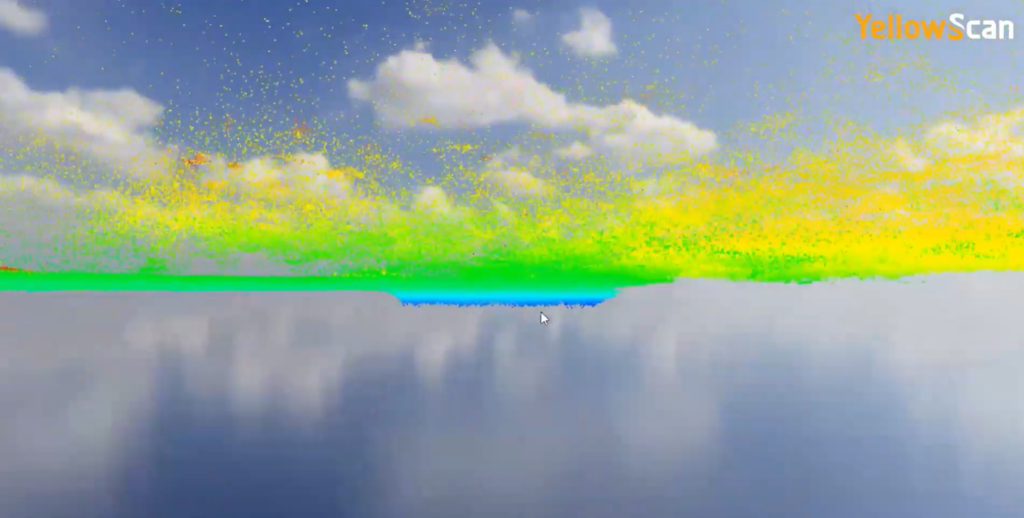
Un rasgo visible similar a un sumidero captado bajo la superficie del agua utilizando el LiDAR batimétrico YellowScan.
Parámetros de la misión:
Sistema utilizado:
- YellowScan Navigator
- YellowScan Vx20-300
Ambos se montaron en un dron Tundra 2
Número de vuelos:
- 8 vuelos con YellowScan Navigator
- 2 vuelos con YellowScan Vx20-300
Área de encuesta:
- Aproximadamente 1 km², que abarca tanto la superficie terrestre como la acuática
Parámetros de vuelo:
- Altitud: 80 metros
- Velocidad: 7 m/s
Duración de la misión:
- Planificación y adquisición de datos: ~8 horas (1 jornada laboral completa)
- Procesamiento de datos: ~24 horas
Software de postprocesado:
- YellowScan CloudStation y CloudCompare
2- Ciudad Antigua de Histria
Los objetivos principales eran realizar una cartografía arqueológica de ruinas sumergidas y estructuras de superficie en las proximidades de una zona de túmulos. En este yacimiento arqueológico, la escasa profundidad del agua y la importante perturbación de la señal GNSS planteaban dificultades para los métodos de prospección convencionales. El Navegador proporcionó datos batimétricos utilizables a pesar de estas limitaciones, ayudando a los investigadores a descubrir e interpretar estructuras sumergidas de importancia histórica.
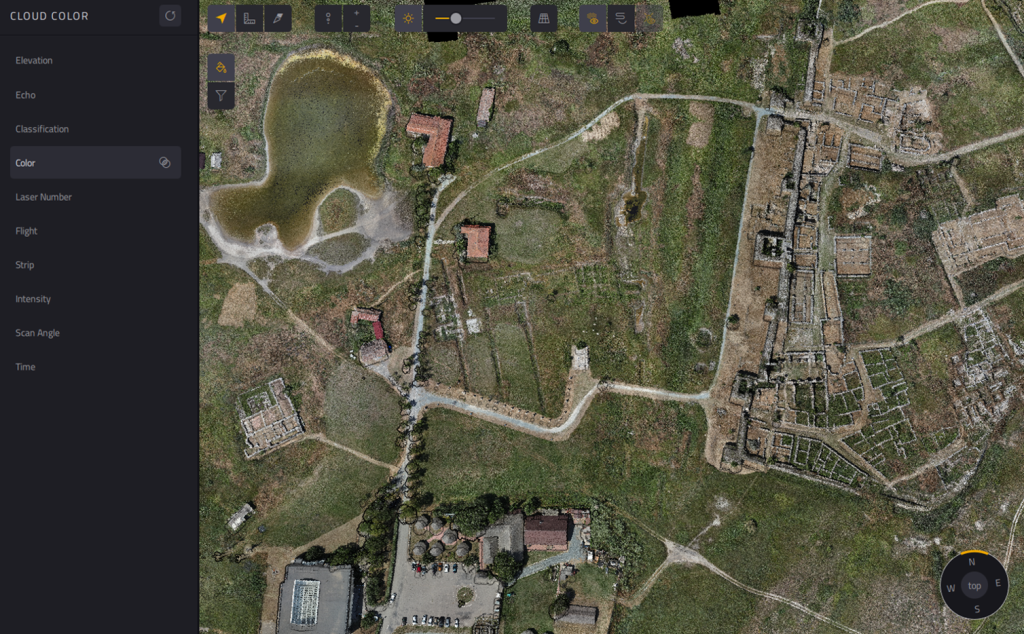
Nube de puntos coloreada de la antigua ciudad de Histria procesada en YellowScan CloudStation.
Parámetros de la misión:
Sistemas utilizados:
- Navegador YellowScan (montado en la Tundra 2)
- YellowScan Vx20-300 (montado en la Tundra 2)
- YellowScan Surveyor Ultra (montado en DJI Matrice 300)
Número de vuelos:
- 5 vuelos con Navegador
- 4 vuelos con Vx20-300
- 2 vuelos con Surveyor Ultra
Área de la encuesta:
- Aproximadamente 0,5 km², que abarca la Antigua Ciudad de Histria, las masas de agua circundantes, las zonas pantanosas y una zona de túmulos.
- Además, se voló un área de ~20 km² para la adquisición de datos fotogramétricos como información complementaria
Parámetros de vuelo:
- Altitud: 80 metros
- Velocidad: 7 m/s
Duración de la misión:
- Planificación y adquisición de datos: aproximadamente 2 días laborables completos (incluido el vuelo fotogramétrico ampliado)
- Procesamiento de datos: aproximadamente 24 horas
Software de postprocesado:
- YellowScan CloudStation y CloudCompare
3- Río Argeș y presa de Mihăilești
Esta misión tierra adentro combinó datos LiDAR topográficos y batimétricos para apoyar el modelado de inundaciones y supervisar la integridad estructural de la presa y las riberas circundantes. La integración de las exploraciones aéreas y batimétricas permitió realizar un análisis hidrológico exhaustivo y fundamentar futuras decisiones sobre infraestructuras, al tiempo que proporcionó información arqueológica sobre una zona cercana al río y cubierta por la exploración.
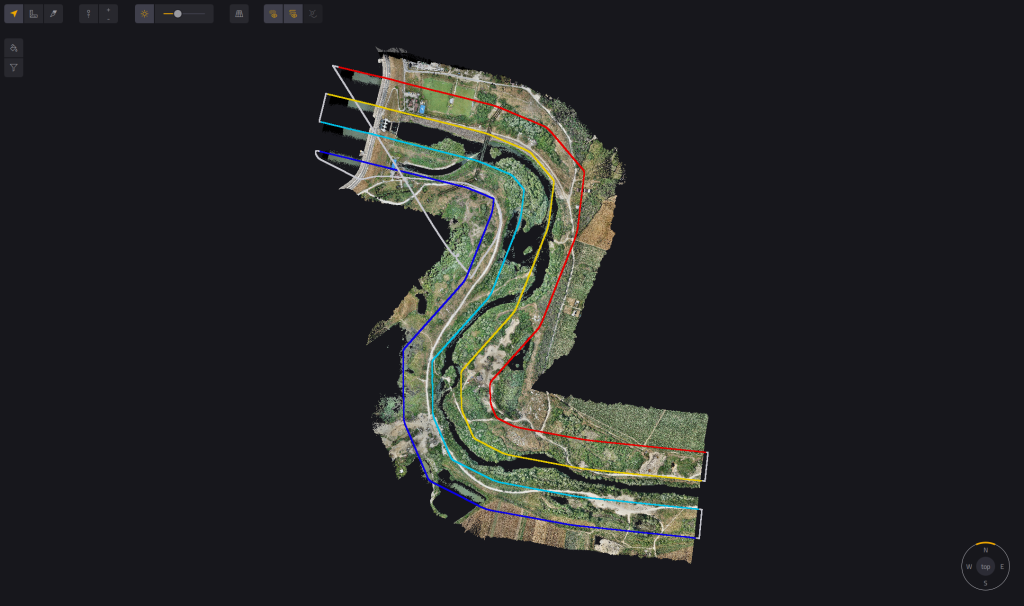
Nube de puntos coloreada y plano de vuelo de la presa.
Parámetros de la misión:
Sistemas utilizados:
- YellowScan Navigator
- YellowScan Vx20-300
Número de vuelos:
- 4 vuelos con Navegador
- 2 vuelos con Vx20-300
Área de encuesta:
- Aproximadamente 3,2 km²
Parámetros de vuelo:
- Altitud: 80 metros
- Velocidad: 7 m/s
Duración de la misión:
- Planificación y adquisición de datos: aproximadamente 8 horas (1 jornada laboral completa)
- Procesamiento de datos: aproximadamente 24 horas
Software de postprocesado:
- YellowScan CloudStation y CloudCompare
Resultados
A través de estas misiones, los equipos demostraron cómo el LiDAR basado en UAV puede revelar datos de gran precisión en zonas tradicionalmente difíciles de alcanzar o cartografiar. El YellowScan Navigator demostró su eficacia incluso en condiciones de visibilidad limitada e interferencias GNSS, proporcionando resultados batimétricos fiables. Mientras tanto, el Surveyor Ultra y el Vx20-300 proporcionaron datos topográficos densos y precisos para construir modelos digitales completos del terreno.
Mediante la integración de sus sistemas, La Orizont y el Instituto Nacional de Física de la Tierra abordaron con éxito diversas necesidades topográficas, desde la conservación del patrimonio cultural hasta la evaluación del riesgo de inundaciones, poniendo de relieve la potencia y flexibilidad de los flujos de trabajo LiDAR de UAV multisensor.
«A pesar de la difícil turbiedad del agua y de las interferencias del GPS, el Navegador proporcionó sistemáticamente datos batimétricos utilizables para el análisis de infraestructuras y arqueológico.

Agradecimiento
Este trabajo fue apoyado por el Programa Nacional de Investigación, proyecto SOL4RISC no. PN 23360301
