LiDAR pour les voitures : Comprendre la technologie de base

La technologie de détection et de télémétrie par ondes lumineuses (LiDAR) équipe les « yeux » des véhicules autonomes. Le principe du LiDAR est assez simple à comprendre : le système mesure le temps que mettent les impulsions laser à rebondir sur les objets et à revenir vers le capteur. Ce concept simple permet de créer des cartes 3D détaillées avec une précision exceptionnelle – environ 0,1 degré de résolution spatiale.
Les systèmes LiDAR intègrent 4 composants principaux, qu’ils soient montés sur des véhicules automobiles, des avions ou des drones :
- Transmetteur laser: Envoie des impulsions de lumière infrarouge à des longueurs d’onde spécifiques (850nm, 905nm ou 1550nm).
- Récepteur photodétecteur: Capte les points laser réfléchis
- Scanner: Regroupe les points laser en « nuages de points » pour construire des modèles 3D.
- Unité de traitement: Transforme les données spatiales en mesures de position précises
Le processus de balayage LiDAR suit des étapes précises. Tout d’abord, un faisceau laser se déclenche et met en marche une horloge de chronométrage. Le faisceau traverse l’optique, frappe les objets, rebondit à travers l’optique du récepteur, atteint les photodétecteurs qui convertissent la lumière en signaux électriques et se transforme finalement en données numériques sous forme de nuages de points.
Les systèmes LiDAR pour l’automobile sont aujourd’hui dominés par deux méthodes principales. La méthode du temps de vol direct (dToF) calcule la distance en mesurant le temps de parcours de la lumière. L’onde continue à modulation de fréquence (FMCW) examine les différences de fréquence entre les ondes laser envoyées et reçues. Le FMCW ajoute une autre caractéristique utile : il peut mesurer la vitesse en utilisant l’effet Doppler.
Le LiDAR se distingue pour les véhicules autonomes parce qu’il « voit » tout ce qui se trouve autour de la voiture avec une excellente perception de la profondeur. Alors que les caméras ont besoin de lumière pour fonctionner, le LiDAR fonctionne tout aussi bien dans l’obscurité totale et par mauvais temps. La technologie peut repérer différents objets avec une grande précision, qu’il s’agisse de voitures, de personnes ou de petits objets comme des casques de football.
Les exigences en matière de sécurité imposent au LiDAR automobile de voir à 200-300 mètres devant lui. Cette distance permet aux véhicules roulant à plus de 100 km/h de réagir en toute sécurité aux obstacles. Les normes IEC 60825-1 limitent la puissance des lasers, ce qui influe sur les longueurs d’onde que les fabricants peuvent utiliser.
Génération d’impulsions laser LiDAR
Les systèmes LiDAR ont besoin d’impulsions laser pour cartographier leur environnement. Vous apprendrez dans ce qui suit comment ces impulsions constituent la base d’une cartographie 3D précise dans les applications automobiles.
Comprendre la génération laser dans le LiDAR automobile
Le LiDAR commence par une source laser à l’intérieur de l’appareil. Cette source crée de courtes impulsions lumineuses d’une durée de quelques nanosecondes à quelques microsecondes. Avant d’atteindre l’environnement, ces impulsions passent par des contrôleurs de faisceau et des systèmes optiques.
Deux méthodes principales permettent de générer ces impulsions laser :
- Temps de vol pulsé (ToF): Envoi d’impulsions lumineuses distinctes à des moments précis.
- Onde continue à modulation de fréquence (FMCW): Crée un faisceau régulier avec des motifs de fréquence changeants.
Les systèmes LiDAR utilisent trois types de sources laser, chacune présentant des avantages uniques :
- Lasers à émission par la tranche (EEL): Populaires dans les systèmes à 905 nm, ils offrent un bon rapport qualité-prix mais sont moins stables sur le plan spectral.
- Lasers à cavité verticale émettant par la surface (VCSEL): Meilleure stabilité thermique (0,06 nm-K-¹ contre 0,25 nm-K-¹ pour les EEL)
- Lasers à fibre: Utilisés dans les systèmes à 1550 nm, ils offrent la meilleure qualité de faisceau, mais sont plus coûteux.
Choisir entre 850nm, 905nm et 1550nm
| Longueur d’onde | Sécurité des yeux | Capacité de portée | Facteurs de coût | Performances météorologiques |
|---|---|---|---|---|
| 850nm | Limitée | Modéré | Faible | Équilibré |
| 905nm | Limitée | Jusqu’à ~200m | Plus faible | Meilleur sous la pluie/neige |
| 1550nm | Plus élevée | Jusqu’à ~350m | Plus élevé | Meilleur dans le brouillard |
La sécurité oculaire crée la plus grande différence entre les longueurs d’onde. La lumière comprise entre 400 et 1400 nm peut atteindre la rétine et causer des dommages. En revanche, les longueurs d’onde supérieures à 1400 nm s’arrêtent à la surface de l’œil, ce qui les rend plus sûres. Cet avantage en termes de sécurité permet aux lasers de 1550 nm d’utiliser 40 fois plus de puissance que les versions de 905 nm.
Le pouls et l’énergie : Trouver le bon équilibre
Les systèmes LiDAR modernes émettent des impulsions à des fréquences comprises entre 50 kHz et 2 MHz. Des taux plus élevés créent des nuages de points plus denses, montrant plus de détails dans la carte 3D.
Les règles de sécurité des yeux fixent des limites strictes à l’énergie d’impulsion. La norme IEC 60825-1 exige que le LiDAR automobile réponde aux niveaux de sécurité de la classe 1. Cela limite les systèmes à 905 nm à une portée d’environ 100 mètres.
La largeur d’impulsion est également importante. Des impulsions plus courtes peuvent donner une meilleure résolution mais créent plus de bruit. La plupart des systèmes utilisent des impulsions de plusieurs centaines de picosecondes pour équilibrer ces facteurs.

Test de voiture autonome avec quatre scanners LiDAR à 360° (© Unsplash)
Comprendre la détection du signal de retour du LiDAR
Les systèmes LiDAR doivent capter et traiter les impulsions laser après qu’elles aient rebondi sur les objets. Vous apprendrez dans ce qui suit comment ces faibles signaux lumineux se transforment en données électriques utiles pour la cartographie en 3D.
Types de photodétecteurs LiDAR et leurs fonctions
Les récepteurs LiDAR utilisent des dispositifs spéciaux de détection de la lumière appelés photodétecteurs. Ceux-ci convertissent la lumière entrante en signaux électriques compréhensibles par les ordinateurs. Trois types principaux sont utilisés dans les systèmes LiDAR automobiles modernes :
Les photodiodes à avalanche (APD) transforment la lumière en courant électrique grâce à deux effets :
- L’effet photoélectrique capte la lumière
- La multiplication interne amplifie le signal
Les APD au silicium fonctionnent bien avec la lumière infrarouge proche et coûtent moins cher, tandis que les APD InGaAs capturent des longueurs d’onde plus grandes (1550nm) mais coûtent plus cher.
Les diodes à avalanche à photon unique (SPAD) fonctionnent différemment :
- Utiliser le « mode Geiger » avec une tension inverse élevée
- Peut détecter des photons uniques
- Mesurer le temps avec une grande précision (picosecondes)
- Besoin de 400ns à 1μs de « temps de repos » entre les mesures
Les photomultiplicateurs au silicium (SiPM) offrent la solution la plus récente :
- Remplacer les anciens APDs pour la lumière 905nm
- Contient de nombreuses petites cellules SPAD
- Fournit une excellente amplification du signal
- Compter le nombre exact de photons
Certains systèmes nécessitent des détecteurs InP/InGaAs spéciaux pour les grandes longueurs d’onde. Ceux-ci doivent rester très froids (moins de -60°C) et produisent davantage de signaux indésirables.
Rendre les signaux faibles utilisables
Les signaux lumineux qui atteignent les photodétecteurs sont très faibles au départ. Les amplificateurs à transimpédance (TIA) résolvent ce problème en transformant de minuscules courants lumineux en tensions mesurables.
Les TIA d’aujourd’hui atteignent des performances impressionnantes :
- Niveaux de bruit jusqu’à 0,2 fA/√Hz
- Gain jusqu’à 10^13 V/A
Les AIT modernes présentent plusieurs caractéristiques utiles :
- Les circuits de filtrage de la lumière éliminent la lumière ambiante indésirable
- Les systèmes de protection gèrent la surcharge des signaux
- Les commutateurs de canaux réduisent le nombre de composants nécessaires
La gestion du bruit constitue le plus grand défi. Trois approches principales permettent d’obtenir des signaux plus clairs :
- Utilisation d’impulsions laser plus fortes
- Rendre les détecteurs plus sensibles
- Filtrer le bruit
Les filtres avancés utilisent des statistiques et des algorithmes intelligents qui s’adaptent aux conditions changeantes. Ils doivent fonctionner instantanément pour le LiDAR automobile, même s’ils nécessitent des calculs complexes.

Carte de l’environnement en 3D générée par LiDAR à partir d’un véhicule autonome, détectant les objets en temps réel
Mesure du temps de vol : Comment le LiDAR calcule la distance
Le principe du LiDAR est assez simple à comprendre : il s’agit de mesurer des distances à l’aide de signaux lumineux réfléchis. Deux méthodes principales permettent de réaliser cette tâche, chacune fonctionnant différemment et offrant des avantages uniques.
Méthodes de temps de vol direct (dToF)
Le dToF mesure le temps exact qui s’écoule entre l’envoi d’une impulsion laser et son retour. Le calcul est simple : la distance est égale à la moitié du temps aller-retour multiplié par la vitesse de la lumière. Mais la synchronisation doit être parfaite : un décalage d’une nanoseconde seulement se traduit par une erreur de distance de 15 centimètres.
Les systèmes dToF automobiles actuels fonctionnent de deux manières :
- Mode coup par coup: Lancement d’une impulsion, mesure du temps de retour
- Mode multi-coups: Crée des modèles de synchronisation à partir de plusieurs impulsions pour obtenir des signaux plus clairs.
Les systèmes utilisent des convertisseurs temps-numérique (CTN) ou des convertisseurs analogique-numérique (CAN) pour traiter les signaux. Les systèmes ADC coûtent plus cher mais sont plus performants car ils peuvent utiliser des méthodes de détection avancées allant au-delà de la simple synchronisation.
Comprendre le LiDAR FMCW
La technologie FMCW offre une approche différente qui gagne en popularité dans les voitures. Au lieu d’impulsions distinctes, elle envoie des ondes laser continues qui changent de fréquence selon un modèle (appelé lumière chirpée). La différence de fréquence entre la lumière envoyée et la lumière renvoyée – la fréquence de battement – nous indique la distance de la cible.
Le FMCW présente plusieurs avantages :
- Mesure à la fois la distance et la vitesse grâce à l’effet Doppler
- Utilise moins d’énergie que le dToF pour la même portée
- Fonctionne mieux lorsque plusieurs LiDAR fonctionnent à proximité.
- Bonne performance dans des conditions difficiles
Comment les conditions météorologiques affectent la précision du LiDAR
Les conditions météorologiques peuvent avoir un impact réel sur le fonctionnement du LiDAR. La pluie pose deux problèmes :
- Les gouttes de pluie reflètent les impulsions avant qu’elles n’atteignent les cibles
- Les mesures de distance se trompent lorsqu’elles touchent des gouttes de pluie
C’est le brouillard qui pose le plus de problèmes au LiDAR. Les molécules d’eau présentes dans le brouillard diffusent la lumière partout, ce qui rend difficile la distinction entre les objets réels et les gouttelettes d’eau. Les performances se dégradent à mesure que le brouillard s’épaissit – la détection commence à échouer à partir de 10 mm/h de pluie et cesse de fonctionner à partir de 50 mm/h.
La neige provoque des problèmes similaires en réfléchissant et en diffusant la lumière. Même par temps clair, la lumière du soleil peut tromper le système en lui faisant voir des choses qui ne sont pas là.
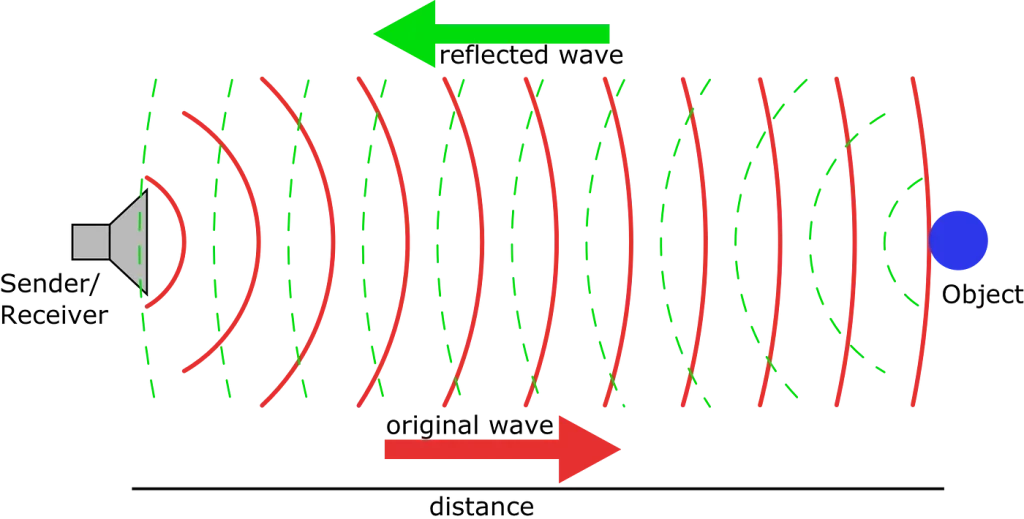
Principe de base de la mesure de distance par réflexion d’ondes
Création de nuages de points 3D à partir de données LiDAR
Les scanners LiDAR capturent des nuages de points en 3D. Mais comment ces mesures de distance deviennent-elles des modèles 3D utiles ? Cette section explique comment les données brutes sont transformées en cartes détaillées qui aident les véhicules à naviguer.
Construire des nuages de points étape par étape
Les systèmes LiDAR collectent deux types d’informations :
- Distance parcourue par la lumière
- L’intensité du signal renvoyé
Ces données deviennent un nuage de points en 3D – une carte détaillée de tout ce qui se trouve autour du capteur.
Différents algorithmes traitent des tâches spécifiques dans la génération de nuages de points :
- Les algorithmes de filtrage nettoient les données désordonnées
- Les algorithmes de segmentation regroupent les points similaires
- La détection au sol permet de repérer les éléments importants
Pour les voitures, les algorithmes de regroupement s’avèrent particulièrement utiles. L’algorithme Real-time Point Cloud Clustering (RTPCC-RL) trie les points en fonction de la distance pour travailler plus rapidement. Cette méthode traite les données en seulement 100 millisecondes tout en restant précise.
Comprendre la qualité des nuages de points
La densité de points nous indique le degré de détail de notre carte 3D. Nous la mesurons en points par mètre carré (ppsm). Des travaux différents nécessitent des densités différentes :
- Parkings : 2-4 ppsm fonctionnent bien
- Identification des véhicules : besoins 8-16 ppsm
- Études sur les arbres : jusqu’à 50 ppsm pour les premiers retours, jusqu’à 200 ppsm au total
La résolution spatiale dépend principalement de deux éléments :
- L’étendue de chaque impulsion laser (IFOV)
- Distance des objets
Les meilleurs systèmes LiDAR gèrent ce problème de manière intelligente. Certains utilisent une résolution variable – très précise (0,07°) au milieu tout en ayant une vision totale de 28° autour d’eux.
Faire fonctionner le système en temps réel
Le système LiDAR pour voitures est confronté à un défi de taille : traiter instantanément d’énormes quantités de données. Chaque balayage crée des millions de points qui doivent être traités rapidement. Cette tâche devient délicate lorsque la puissance informatique des voitures est limitée.
La vitesse est aussi importante que la précision. Si certaines méthodes, comme le traitement des histogrammes, fonctionnent bien, elles nécessitent une grande puissance de calcul. Trois approches principales permettent de résoudre ce problème :
- 1. De meilleurs systèmes de transfert de données
- 2. Compression spéciale des données
- 3. Organisation des points sur la base d’une grille
Ils permettent de relever le plus grand défi : les voitures doivent comprendre leur environnement en quelques millisecondes pour rouler en toute sécurité. Les systèmes d’aujourd’hui ne cessent de s’améliorer dans ce traitement rapide, permettant des fonctions allant de la prévention des accidents à la lecture des panneaux de signalisation.

Rue urbaine capturée sous forme de nuage de points LiDAR 3D avec un chemin de navigation planifié
Technologie LiDAR : Prochaines étapes
La technologie LiDAR devient de plus en plus petite, de moins en moins chère et de plus en plus performante. Les chiffres du marché en témoignent : les ventes de systèmes LiDAR pour l’automobile devraient passer de 538 millions d’USD en 2023 à 3632 millions d’USD en 2029, soit une croissance de 38 % par an.
La technologie LiDAR à semi-conducteurs est la plus prometteuse. À l’heure actuelle, les systèmes hybrides à miroirs rotatifs représentent 66 % des ventes prévues pour 2024, tandis que les systèmes à base de MEMS en représentent 32 %. À l’avenir, les systèmes LiDAR à semi-conducteurs – en particulier les systèmes LiDAR flash – devraient occuper 37 % du marché. Ces systèmes fonctionnent mieux, nécessitent moins d’entretien et sont moins coûteux à fabriquer.
Le principe du LiDAR est assez facile à comprendre, mais il est difficile de le rendre abordable. Les systèmes à longue portée actuels coûtent environ 500 USD. Pour une utilisation généralisée, les prix doivent descendre en dessous de 300 USD pour les systèmes à longue portée et de 100 USD pour les systèmes à courte portée. Certains fabricants chinois proposent déjà des systèmes à moins de 500 dollars.
La technologie proche infrarouge (NIR) domine la technologie LiDAR actuelle :
- Les longueurs d’onde 905/940 nm alimentent 90 % des systèmes LiDAR pour voitures attendus en 2024
- Cette répartition entre le proche infrarouge et l’infrarouge à ondes courtes devrait rester stable pendant des années
De nouvelles idées ne cessent d’émerger. L’une d’entre elles utilise des ondes sonores au lieu de pièces mécaniques pour diriger les faisceaux laser. Les systèmes LiDAR pourraient ainsi passer de la taille d’une tasse à café à celle d’une boîte d’allumettes.
Le FMCW LiDAR est prometteur pour une meilleure détection de la distance et de la vitesse, mais il ne devrait pas être utilisé dans les voitures avant 2027-2028.
Au-delà de l’amélioration du matériel, les systèmes LiDAR fonctionneront avec :
- Réseaux 5G
- Intelligence artificielle
- Outils de cartographie en temps réel
Ces avancées permettront aux voitures autonomes de mieux fonctionner et créeront de nouvelles utilisations dans les domaines de l’agriculture, du transport maritime et de l’imagerie médicale.
Questions fréquemment posées
Comment la technologie LiDAR permet-elle de créer des cartes en 3D pour les véhicules autonomes ?
Le LiDAR crée des cartes en 3D en émettant des impulsions laser et en mesurant le temps qu’elles mettent à se réfléchir sur les objets et à revenir vers le capteur. Ces données sont ensuite traitées pour générer un nuage de points détaillé de l’environnement du véhicule, fournissant des informations précises sur la distance et l’espace.
Quels sont les principaux composants d'un système LiDAR automobile ?
Un système LiDAR automobile se compose généralement de quatre éléments principaux : un émetteur laser qui émet des impulsions lumineuses, un récepteur photodétecteur qui capte la lumière réfléchie, un scanner qui regroupe les points reçus et une unité de traitement qui calcule des positions précises et crée des modèles 3D.
Quelles sont les performances du LiDAR dans différentes conditions météorologiques ?
Les performances du LiDAR peuvent être affectées par des conditions météorologiques défavorables. La pluie et la neige peuvent réduire la densité et la précision des nuages de points, tandis que le brouillard pose des problèmes importants en diffusant la lumière et en créant du bruit. Cependant, le LiDAR fonctionne généralement mieux que les caméras dans des conditions de faible luminosité et peut encore fournir des données précieuses dans de nombreux environnements difficiles.
Quelles sont les avancées en matière de technologie LiDAR pour les voitures ?
La technologie LiDAR future se concentre sur les systèmes à semi-conducteurs sans pièces mobiles, qui offrent une fiabilité accrue et des coûts réduits. D’autres avancées incluent le développement du LiDAR FMCW (Frequency Modulated Continuous Wave) pour des mesures simultanées de distance et de vitesse, et l’intégration du LiDAR avec les réseaux AI et 5G pour des capacités améliorées.
Comment le LiDAR se compare-t-il aux autres technologies de détection utilisées dans les véhicules autonomes ?
Le LiDAR offre une résolution spatiale et une perception de la profondeur supérieures à celles des méthodes de détection traditionnelles. Contrairement aux caméras qui utilisent la lumière visible, le LiDAR peut fonctionner efficacement dans l’obscurité et dans des conditions météorologiques difficiles. Il peut également différencier différents types d’objets avec une grande précision, ce qui en fait une technologie cruciale pour la navigation des véhicules autonomes et la détection des obstacles.