Distance LiDAR : Triangulation, temps de vol, déphasage

Le saviez-vous ?
Il existe trois façons différentes de déterminer les distances à l’aide de LiDAR.
Les capteurs LiDAR utilisent un ou plusieurs faisceaux laser pour mesurer la distance. Ce sont des capteurs actifs, qui émettent un rayonnement à une longueur d’onde donnée et reçoivent un signal en retour. Il existe trois techniques principales pour déterminer une mesure de distance à partir de l’émission et de la réception d’un rayonnement laser : la triangulation, le temps de vol et le déphasage.
Systèmes de mesure par triangulation
Ils sont composés d’un émetteur laser et d’une caméra fixée entre eux par un angle constant (figure 1). La distance et l’orientation entre la caméra et l’émetteur laser sont connues. Le laser émet sur l’objet cible un motif qui est visualisé sur l’image de la caméra. En fonction de la distance à la surface, le point apparaît à un endroit différent dans le champ de vision de la caméra. Grâce à la trigonométrie, il est alors possible de déterminer la distance entre la source laser et l’objet cible. Cette technique est principalement utilisée pour les systèmes LiDAR portables qui fonctionnent à courte distance.
Pour ce type de système, l’erreur de mesure est directement liée à la distance de l’objet mesuré. Pour cette raison, il est principalement utilisé pour une gamme limitée d’applications, souvent moins de 10 m. Il convient de noter que cette technique permet d’atteindre une précision de l’ordre de la dizaine de micromètres.
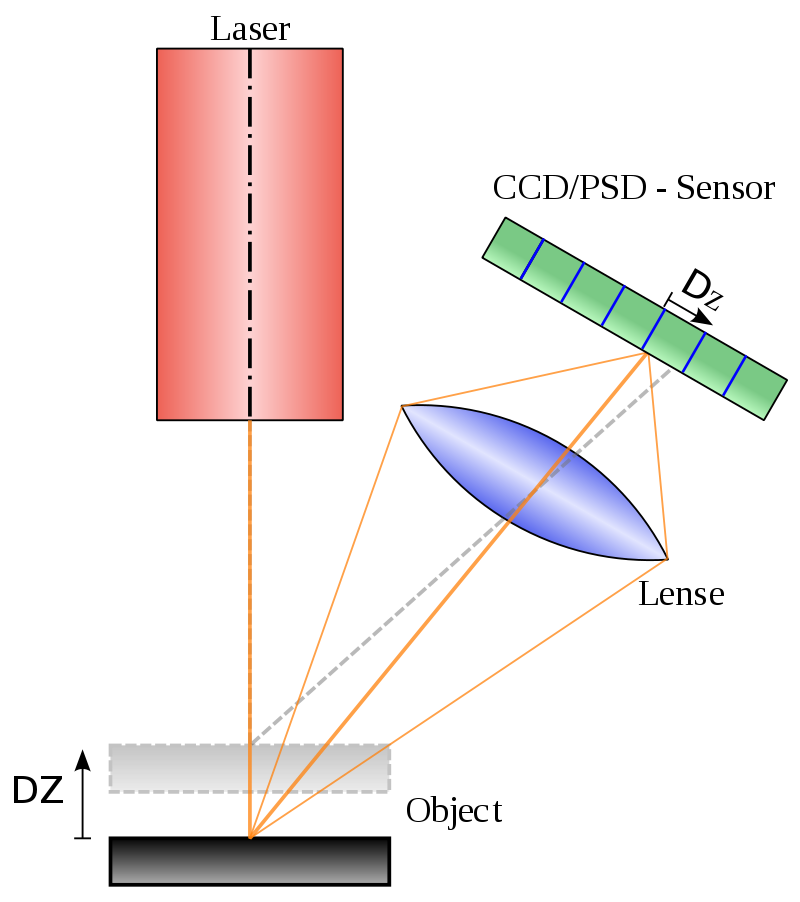
Georg Wiora(Dr. Schorsch), Principe d’un capteur de triangulation laser, 10 avril 2006
Systèmes de mesure du temps de vol
La mesure du temps de vol (ToF) correspond au temps de parcours d’une impulsion laser depuis son émission jusqu’à la détection de la partie réfléchie par une cible. Connaissant l’indice de réfraction du milieu et utilisant la vitesse de la lumière, il est alors possible de déduire la distance de déplacement de la lumière (figure 2).
La vitesse d’acquisition constitue la limite des performances des systèmes laser ToF. Ces systèmes doivent d’abord recevoir le signal de retour avant d’émettre une autre impulsion laser. Mais selon les besoins, il est possible d’augmenter la cadence des tirs laser (nombre de points) mais au détriment de la distance. Ils sont utilisés pour les calculs de distance à longue portée, tels que les systèmes LiDAR pour l’espace, l’air ou l’automobile. Les systèmes LiDAR de YellowScan en font partie.
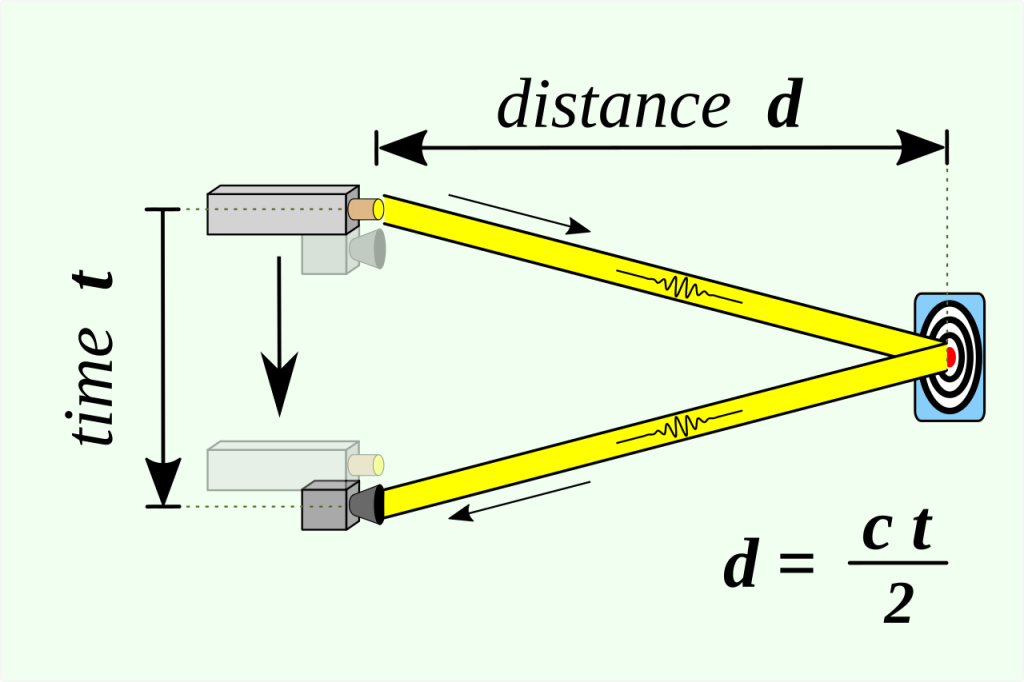
RCraig09, Principes de base du temps de vol appliqués à la télémétrie laser, 1er mai 2020
Systèmes de mesure du déphasage
Par rapport aux systèmes ToF, les systèmes à déphasage nécessitent l’utilisation de lasers continus. En le modulant (en amplitude de fréquence), il est alors possible de mesurer la différence de phase entre 2 faisceaux. Les faisceaux sont séparés à la sortie du système LiDAR. L’un va directement au détecteur et l’autre va à la cible et revient.
Ces systèmes de mesure ont généralement une vitesse d’acquisition des données plus élevée, une meilleure résolution, un bruit plus faible et une plus grande précision que les systèmes de mesure du temps de vol. La limite de ces systèmes dépend du type de modulation utilisé (apériodique ou périodique). Cette technologie se retrouve dans les systèmes de moyenne portée tels que les scanners LiDAR terrestres et intérieurs.
N.B. Auteur Léa Moussy – Le contenu de cet article est protégé par le droit d’auteur.