情報とLiDARソリューションにおける精度と精度の比較 – イエロースキャン

情報分析、測定、分類、特にYellowScanのようなLiDARソリューションでは、「精度」と「正確さ」という用語がしばしば混同されます。両者は異なる意味を持っていますが、UAVベースのLiDARマッピングや機械学習などの分野でソリューションの性能を評価するためにはどちらも不可欠です。これらの違いを理解することは、結果の解釈、しきい値の設定、接続とレポートサービスの最適化の鍵となります。この記事では、LiDARワークフローにおける出力品質に焦点を当て、実世界の例、エラー数値、メトリクスを使用して、測定機器と 情報分類に関するこれらの概念を明確にします。
LiDAR測定装置の精度と精度
計測システムでは、精度と正確さがセンサー出力の品質とシステム全体の性能を決定する。
測定精度
精度とは、測定値が標準値や真の値にどれだけ近いかを意味する。精度が高いということは、測定機器が平均して正しい結果をもたらすことを意味する。例えば、実際の100℃に対して100℃を示す温度計は正確です。LiDAR情報では、高精度とは、点群が実際の物理的な場所と密接に位置合わせされ、オフセットや歪みが最小限に抑えられていることを意味します。これは多くの場合、地上基準点(GCP)を使用して検証されます。
測定精度
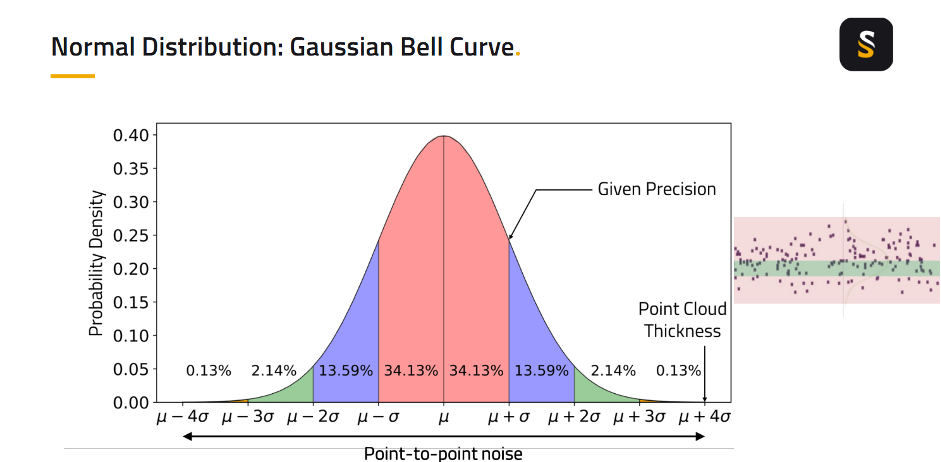
精度は、測定値の一貫性または再現性を測定する。正確さに関係なく、一貫した条件下で同じような結果が得られる場合、その溶液は正確である。例えば、温度計が実際の100℃に対して常に98℃を示すのは、正確ではあるが正確ではない。UAVのLiDARでは、精度は点群の “厚さ “に現れます。薄く、密で、均一な点群は、ノイズを最小限に抑えた高精度の取得を意味します。
測定における主な違い
正確さとは正しさのことであり、精密さとは一貫性のことである。システムは正確であっても正確でないこともあれば、正確であっても正確でないこともある。この違いを理解することは、健全なシステム設計に不可欠であり、研究と現場での実践によって絶えず改良されている。
LiDAR測定と評価レベルの具体的な指標
LiDARマッピングでは、精度は複数のレベルで評価することができます:システムレベル(GNSS、IMU、およびレーザーの組み合わせ)、内部精度(ストリップ内)、および外部ジオリファレンス精度(GCPとの相対)。専門家は、LiDARの出力品質について異なる評価基準を用いています。
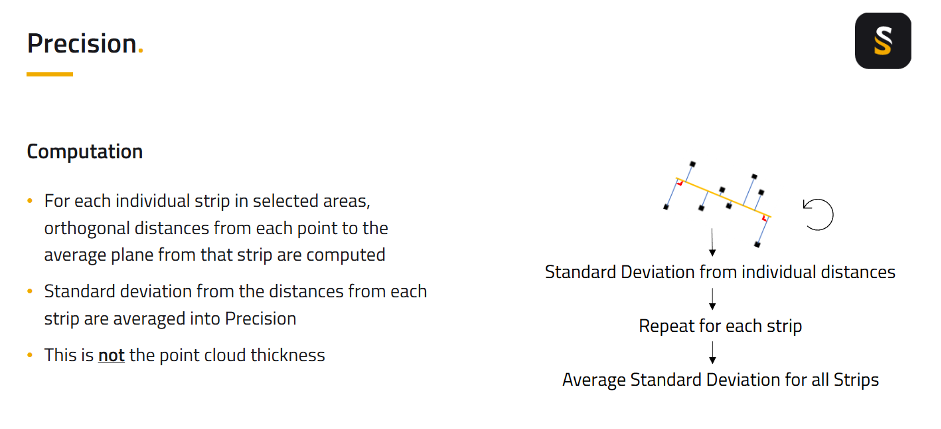
精度(LiDAR)は、ストリップ内の内部一貫性を定量化したもので、最小の内部ノイズを反映した点間距離の標準偏差を表します。これは、LiDARシステムの出力に固有の再現性を強調しています。
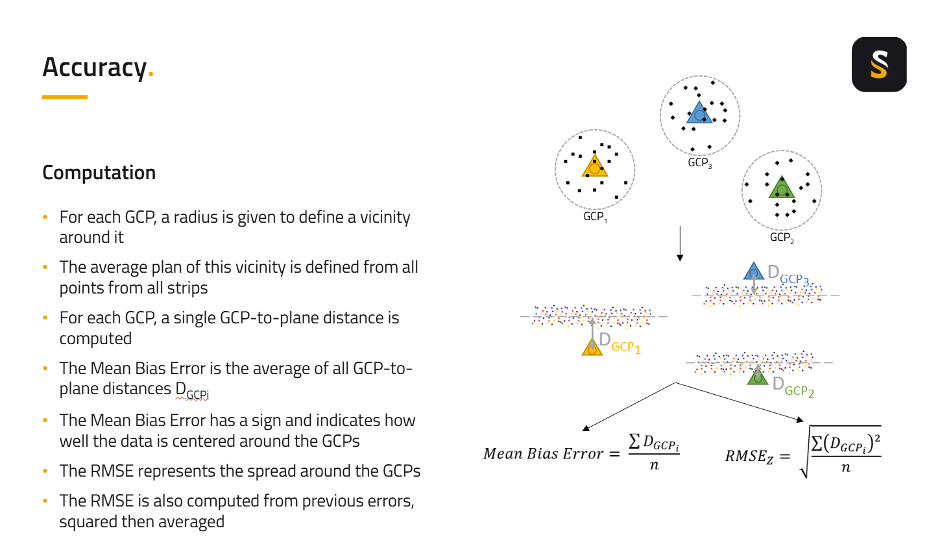
精度(LiDAR)は、GCPを使用して実際の座標とのアライメントを評価します。主な測定基準には、平均バイアス誤差があり、これは出力における系統的なオフセットまたはバイアスを示します。この誤差は、真の位置からの一貫したずれを示すため、特定することが重要です。RMSEz(Root Mean SquaredErrorin Z)はさらに、GCP周辺の広がりを示し、垂直精度の包括的な指標を提供します。
LiDAR実装におけるエラーの原因と影響
複数のエラーソースがLiDARデータの位置精度と全体的な品質に影響を与える可能性があります。
- 機器コンポーネントからの測定誤差:これには、LiDARセンサー自体の固有誤差、GNSS(全地球航法衛星システム)の位置誤差、IMU(慣性計測ユニット)の方位誤差(ロール、ピッチ、ヨー)が含まれる。
- アセンブリーバイアス:スキャナーとINSのミスアライメントやレバーアームの不正確さなど、キャリブレーションの問題を指す。
- 同期の問題:異なる機器コンポーネントの正確なタイムアライメントに関連するコンピューターベースのエラーである。
これらの誤差は、情報の質と位置精度に直接影響します。例えば、小さなIMU誤差(ロール、ピッチ、ヨー)であっても、高度やスキャン角度によってはメートル単位の大きな位置誤差を引き起こす可能性があります。
実際のケーススタディインフラ設計におけるLiDAR測定の品質管理
大規模なインフラ設計プロジェクトでは、正確なLiDAR測定が不可欠です。キャリブレーションは、正確で精密な読み取りを保証するために最も重要です。不一致チェックは、フライトストリップ間の空間的な一貫性を保証します。GCPに対して検証することで、平均バイアス誤差とRMSEzを分析し、厳しい標準しきい値を満たすことで精度を確認します。重大な誤差は潜在的な問題を示し、出力品質が重要な設計および計画作業に適していることを保証します。このケースは、インフラ計画において信頼性の高いLiDARデータを提供するために、精度と正確さの両方が不可欠である理由を示しています。
情報の分類と予測における精度と精度
これらの概念は、入力データから信頼性の高い予測を行うことを目的とする分類モデルの評価にも適用される。
分類指標と予測
分類のアルゴリズムは、予測性能を評価するために特定の測定基準を使用します。精度(Classification)は、すべての予測の中で正しい予測の割合です。精度(Classification)とは、すべての陽性予測の中の真陽性の割合で、偽陽性が高くつく場合に重要です。Recallは、すべての実際の陽性の中の真の陽性の割合であり、偽陰性が高価である場合に重要である。F1-Scoreは、precisionとrecallの間のバランスを提供する。
一般的なエラー数
誤差の数値は、解の性能を評価するのに役立つ。アルゴリズムは多くの場合、予測を改善するために「損失」関数を最小化することを目的としています。MAE、RMSE、標準偏差などの主要メトリクスは、モデルの信頼性とばらつきを評価するのに役立ちます。これらの数値は、フレームワークが 低精度、低精度、またはその両方に苦しんでいるかどうかを識別するのに役立ちます。
分類のための閾値の定義
分類のしきい値は、予測結果の受け入れ基準を決定する上で重要であり、感度と特異度を制御する。例えば、医療診断フレームワークのバイオマーカー閾値は、陽性/陰性の結果を定義する。低いしきい値は感度を上げるが精度を下げる可能性があり、高いしきい値は精度を上げるがリコールを下げる可能性がある。タスクにおいてこれらのバランスをとることは、精度と正確さにとって極めて重要である。政治的な世論調査のような利害の大きいシナリオでは、意思決定における誤ったシグナルを避けるために、高い精度が優先されることがある。この場合、専門家が特定のタスクの要件に基づいて推薦を行う必要があることが多い。
例スパムメールの分類
スパムフィルターの仕事は 予測(「スパム」か「スパムでないか」)をすることである。精度が高いということは、ほとんどのメールが正しく分類されるということです。精度が高いということは、フィルターがメールをスパムとしてマークするとき、それはほとんど常にスパムであることを意味します。閾値の調整は、誤検出(正当なメールがスパムとして検出され、ユーザーにとって損失となる)と誤検出(スパムが検出されない)のどちらを避けることがより重要かによって、精度と想起のバランスを取ります。このタスクの 性質上、アルゴリズムを注意深く設計する必要がある。
分類の結果を理解する
パフォーマンスを評価したり、よくある落とし穴に対処したりする前に、分類タスクにおける基本的な結果を理解することが不可欠である。予測は次のようにグループ分けできる:
- 真陽性(TP):正しく識別された陽性症例
- 偽陽性(FP):陰性の症例が誤って陽性と分類されたもの
- 真陰性(TN):正しく識別された陰性症例
- 偽陰性(FN):陽性の症例が誤って陰性と分類されたもの
これらの値は混同行列を形成し、これは精度、リコール、F1スコアなどの主要な性能指標を計算するための基礎となります。これらの指標は、特に異なるタイプの予測エラーを区別する際に、分類モデルがどの程度うまく機能するかを評価するのに役立ちます。
よくある落とし穴とその避け方
分類モデルにおけるオーバーフィット:モデルは、訓練情報に対しては高い精度を示すが、新しい情報に対しては 精度を欠くことがある。これには、クロスバリデーションを使用し、独立したテストデータセットで精度と正確さの両方を監視することで対処します。系統的エラーの無視:測定または予測における一貫したバイアスは精度を低下させます。測定機器の校正ドリフトを定期的にチェックし、アルゴリズムや 情報収集プロセスの系統的エラーを修正する。
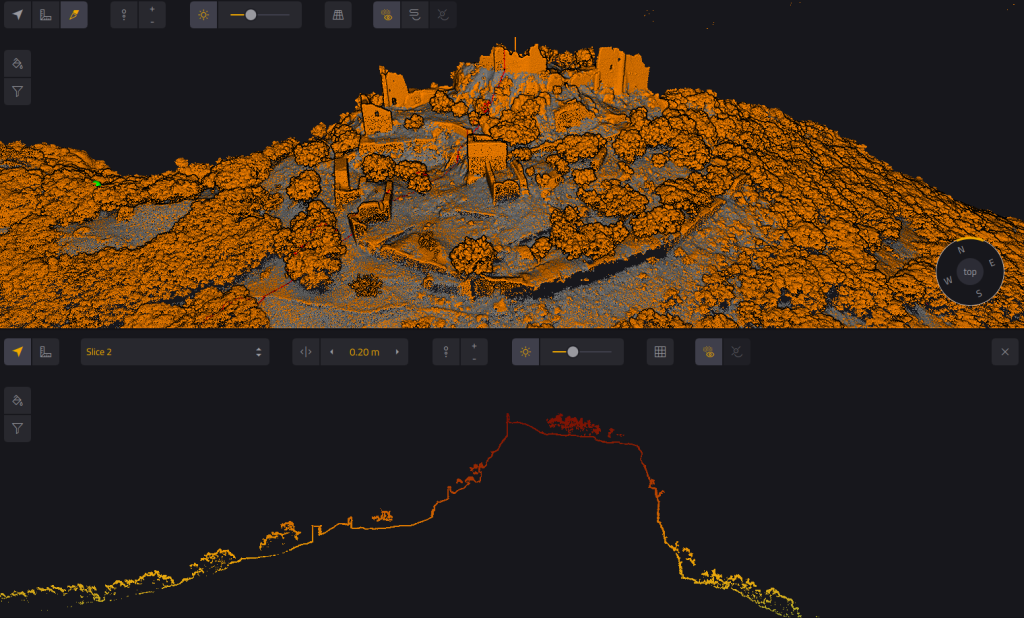
CloudStationソフトウェアのスムージング機能により、ユーザーは点群データセットの精度と鮮明度をよりコントロールすることができます。
パフォーマンス、接続性、レポートの最適化
これらの重要な側面は、測定機器と 情報分類プロセスの両方に普遍的に適用され、アウトプットの全体的な品質と信頼性を保証する。
信頼性の高い接続性の確保
最新の計測・分類フレームワークでは、接続性が重要な役割を果たす。調査結果を効率的に収集、処理、報告するためには、外部デバイス、データベース、サービスと高速に通信する必要があります。シームレスな接続性とサービスとの統合により、リアルタイムのモニタリングと自動レポートが可能になります。RTKベースのLiDARワークフローでは、測量精度はUAVセンサー、ベースステーション、オンボードシステム間の安定したリアルタイム接続の維持に完全に依存します。この接続が低下すると、測位データは信頼できなくなり、セットアップ全体が「トランプの家」のように脆弱になります。データを後で後処理する場合でも、データ取得中の堅牢な接続性の確保は不可欠である。
結果を報告する:数値、値、通知
数字や数値の明確な報告は、利害関係者が結果を効果的に解釈するために不可欠です。自動Eメールサービスは、迅速でタイムリーなコミュニケーションを提供します。LiDARの場合、自動化されたワークフローは、オフィスや現場の専門家に直接、検査可能なQA/QCレポートを配信し、ターンアラウンドタイムと意思決定の信頼性を向上させます。これらのレポートは、データ品質のしきい値を検証し、異常のフラグを立て、プロジェクト仕様への準拠を文書化するのに役立ちます。これにより、手作業が大幅に削減され、トレーサビリティが強化されるため、ユーザーチーム全体の意思決定が加速されます。
最適化のベストプラクティス
精度と正確さを最適化するには、測定機器を定期的に校正し、MAEやRMSEなどの誤差数値を監視し、感度と特異度のバランスをとるために適切な閾値を設定し、リアルタイムで情報を共有するための接続性を確保し、図表や自動化された電子メールを用いて結果を明確に報告することが必要である。情報科学と測定の 性質は進化し続けており、継続的な改善が必要である。
アプリケーションのニーズに品質を合わせる
LiDARの出力に要求される精度と精度のレベルは、最終的な用途によって大きく異なり、すべてのミッションがミリメートルレベルの精度を必要とするわけではありません。例えば、送電線を検出するための測定は、排水設計のための精密な地形モニタリングと比較して、異なる誤差を許容するかもしれません。YellowScanのソリューションは適応性が高いので、専門家は様々なタスクの特定のしきい値や 品質要件に合わせて操作パラメータや処理を調整し、それぞれの明確な目的に最適な出力を確保することができます。
データ測定、分類システム、分析フレームワークを扱う専門家にとって、正確さと精度の明確な把握は不可欠である。精度が真実に近いかどうかを測るのに対し、精度は一貫性を評価します。どちらもアウトプットの品質には欠かせません。ベストプラクティスを適用し、エラー数値を監視し、接続性を確保することで、精度と正確性を最適化することができます。YellowScan LiDARのソリューションは、お客様の ニーズに合わせて一貫性のある正確な測定を行い、誤差を最小限に抑え、アウトプットの信頼性を最大限に高めるように設計されています。

YellowScan LiDARシステム
よくある質問
LiDARはどのようにして異なるミッション間で一貫した結果を保証するのか?
当社のUAV LiDARソリューションは、再現性のために設計されています。安定した高品質の出力が期待できます。設計は低い内部誤差を目指しています。
YellowScanのソリューションが正確で信頼できるのはなぜですか?
先進のGNSS、IMU、レーザー技術の統合により、YellowScanデバイスは実世界に忠実で極めて均一な点群データを提供することができます。つまり、補正が少なく、信頼性が高く、投資回収が早いということです。このシステムの一貫性と高品質な測定量は、専門家から重要な強みとして定期的に挙げられています。
LiDAR機器を手動で校正する必要がありますか?
当社のソリューションには、内蔵キャリブレーション・チェックと直感的なワークフローが含まれています。ユーザーの介入を最小限に抑え、初日から最適なパフォーマンスを実現します。これにより、作業が効率化され、時間が節約されます。