UAVとYellowScan Navigatorによる浅海水深測定

チャレンジ
Enso GeospatialとLIA Engineering and Survey LTD.は、浅瀬のマッピングを改善し、クライアントにトップクラスの結果を提供するために長年協力してきました。より良いデータ品質、より高いポイント密度、より安全で柔軟性のある効率的な調査方法を求めて、彼らは様々なグリーンウェーブLiDARセンサーをテストしてきました。
このミッションの目標は、浅い水域で高解像度の水深データを迅速かつ安全に取得することだった。チームは、海岸線保護構造物周辺の水生インフラと堆積物のモニタリングをサポートする信頼性の高いソリューションを必要としていました。浅瀬の環境は、有人船とマルチビームエコーサウンダー(MBES)を搭載したUSVの両方にとって、スワスカバレッジの制限、防波堤に近づきすぎる危険性、極端に浅い水深のため、大きな課題となります。彼らは、密度、精度、正確さにおいてMBESに匹敵し、浅瀬での運用のリスクがなく、より迅速なターンアラウンドが可能な空中ソリューションを必要としていました。

YellowScan Navigatorによって安全で効率的なUAVベースのデータ収集が可能になった海岸線調査現場。
ソリューション
YellowScan NavigatorはDJI M600 Pro UAVに搭載され、データはYellowScanのCloudStationソフトウェアで処理されました。このセットアップは、浅瀬やトランジションゾーンでの性能、安全性、使いやすさのバランスが適切でした。調査海域(東地中海)の水の透明度は悪く、天候が許せばいつでも迅速な調査が可能であったため、運用面での柔軟性も大きな利点でした。
このプロジェクトは、ニアショア・マッピング能力の向上を目的とした、エンソとLIAエンジニアリングによるいくつかの共同作業のひとつであった。このシステムは、UAVに搭載しても一貫した結果を出すことができるため、実用的で効果的な選択となりました。
データ処理には、Global Mapper(QCおよび座標変換用)、QGIS(ラスター解析用)、QPS Qimera(点群クリーニングおよび手動分類用)などのツールが含まれる。

YellowScan Navigatorを使用した水深測定LiDARフライトプランとカバレッジ。
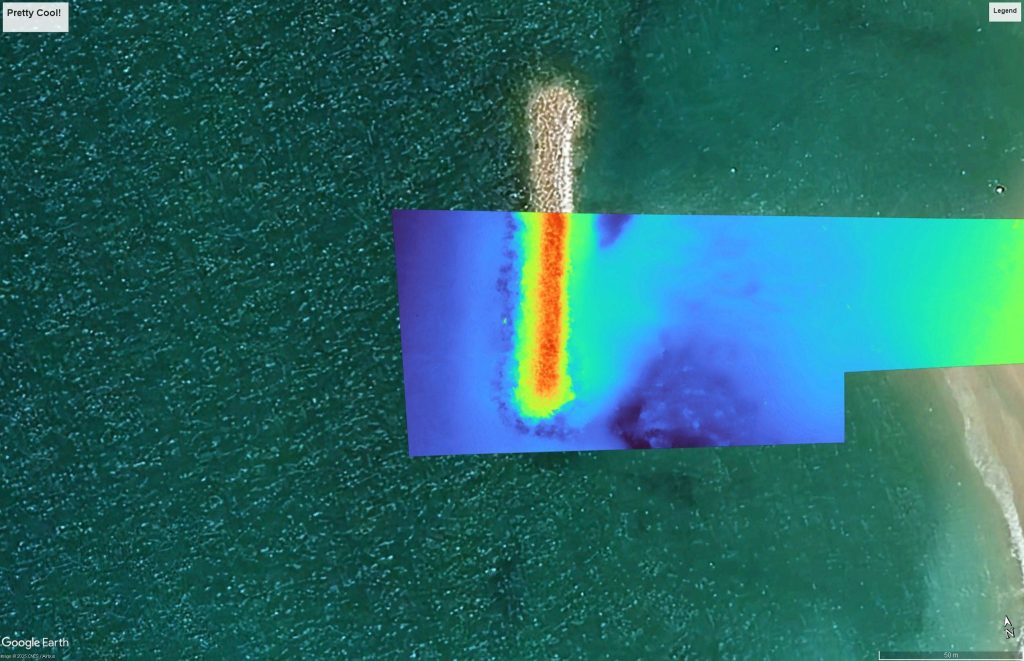
現地のオルソフォトに重ね合わせたLiDARデータ
ミッションパラメーター
- 調査サイズ:200×150メートル
- フライト数1
- 飛行高度と速度:80m AGL、5m/s
計画+捕捉時間:2.5時間、QCのための小規模なSBESサーベイを含む。 - 処理時間1営業日追加
- 使用したシステムDJI M600 Proに取り付けられたYellowScan Navigator
- ポスト処理ソフトウェア CloudStation、Global Mapper、QGIS、QPS Qimera
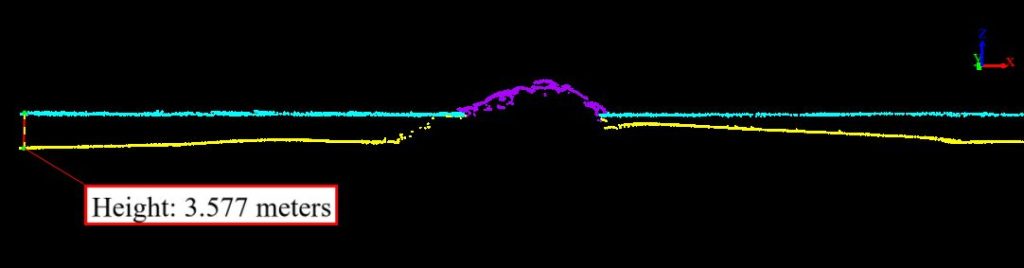
防波堤と周辺海域のLiDARデータの断面図
結果
- 点密度:30~60ポイント/平方メートル
このプロジェクトでは、YellowScan Navigatorが浅瀬や水陸移行帯で高精度で高密度の水深データを取得できることが確認されました。ポイント密度は1平方メートル当たり30~60ポイントで、チームは詳細なモニタリング用途に適した高解像度のDTMを作成することができました。計画から最終処理まで、ミッション全体はわずか1日余りで完了し、ワークフローの効率性が浮き彫りになった。
Navigatorは、UAVに簡単に搭載できる数少ないグリーンウェーブLiDARシステムであり、柔軟性とスピードの両方を提供することが証明された。Navigatorは、低乱流環境においてMBESに代わる強力な選択肢を提供し、動員コストも大幅に削減しました。また、YellowScanのサポートも際立っていました。プロジェクト全体を通して、対応が迅速で、コミュニケーション能力が高く、信頼できるものであったため、チームは自信を持って将来のユースケースを進めることができました。
それに比べ、MBESの作業には少なくとも3~4時間のデータ取得が必要で、航行の安全上、水深3メートル程度に制限される。また、調査現場までの航海に約4時間、音速プロファイルのキャスティングなどシステムの運用にさらに30分と、出動にもコストがかかります。一方、YellowScan Navigatorを使用した場合は、現場まで車で約2時間、離陸前の準備に10分、データ取得に約12分かかりました。
極めて低い動員コストで浅い地域の地形・水深データを採取する能力は、MBESに代わる現実的で信頼性の高い選択肢を提供し、データ密度と精度の面で航空機のエアボーンLiDARから得られるすべての成果物を上回る。
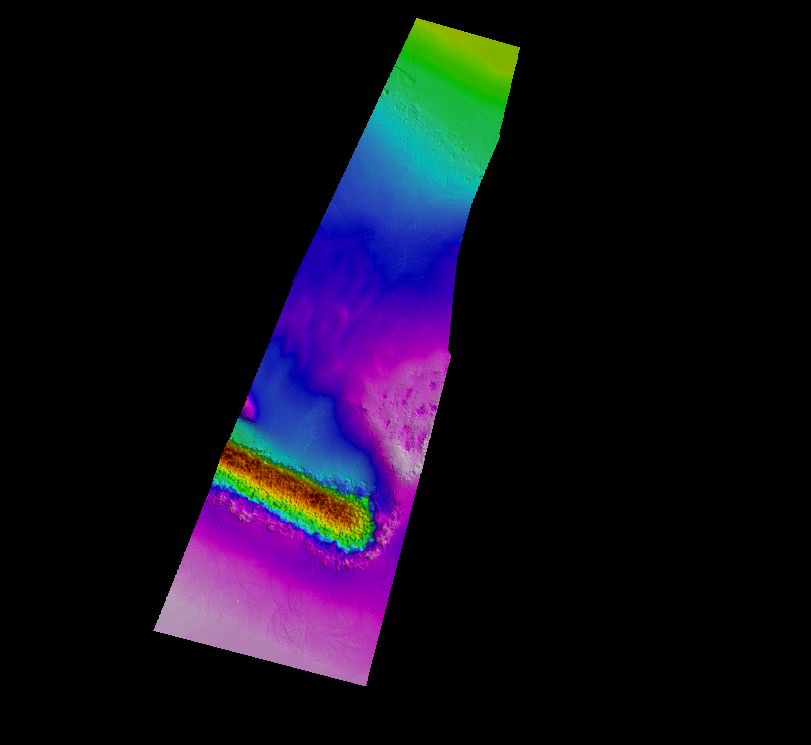
LiDAR点群から得られたデジタル地形モデル(DTM)、
高さ別に色分けされている。
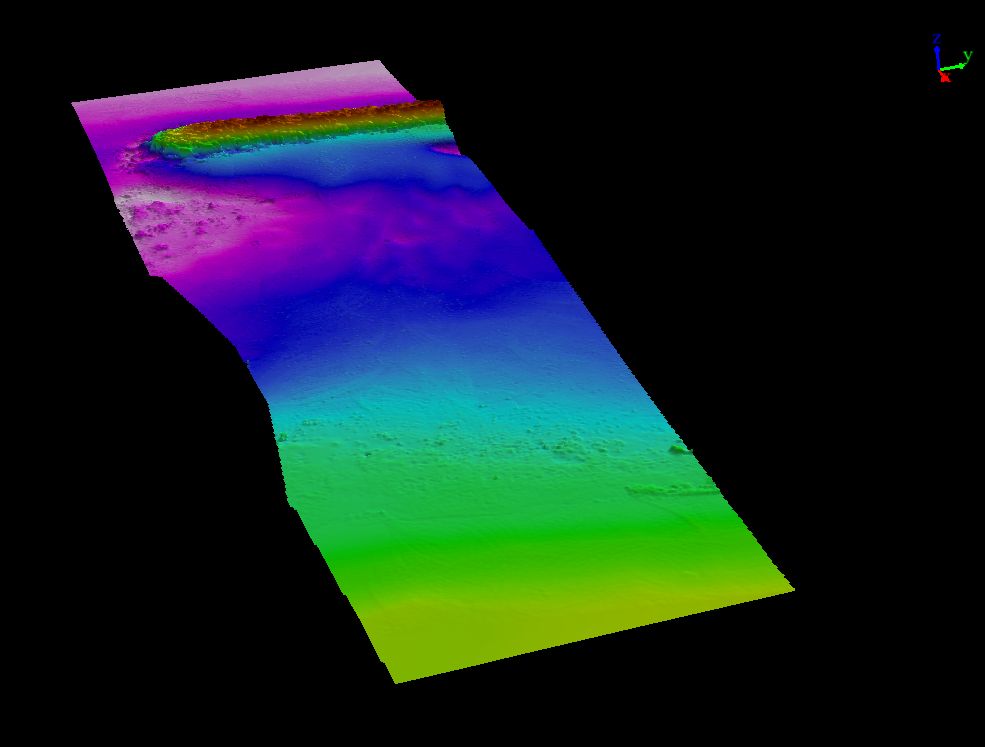
LiDAR点群から得られたデジタル地形モデル(DTM)、
高さ別に色分けされている。
