La navigation LiDAR expliquée : Des principes de base aux applications avancées

Le LiDAR(Light Detection and Ranging) est l’élément vital des systèmes de navigation modernes. Il fournit des mesures spatiales précises grâce à un principe opérationnel à la fois élégant et puissant. Contrairement aux technologies de détection passive, le LiDAR émet activement des impulsions laser vers des objets et mesure le temps de réflexion vers le capteur. Cette mesure du temps de vol permet de calculer des distances exactes à l’aide de la formule d = (c × Δt) / 2, où c représente la vitesse de la lumière et Δt le délai.
La puissance du LiDAR dans le domaine de la navigation vient du fait que l’on sait comment capturer les données environnementales plus rapidement. Les systèmes avancés peuvent prélever des millions d’échantillons par seconde. Un tel échantillonnage à haute fréquence crée des nuages de points denses qui représentent des espaces tridimensionnels avec un niveau de détail remarquable.
Le cœur d’un système LiDAR est constitué de plusieurs composants essentiels qui fonctionnent ensemble. L’émetteur laser génère des impulsions courtes et ciblées qui se dirigent vers les objets cibles, tandis que le photodétecteur capture la lumière rétrodiffusée. Le système utilise des mécanismes de synchronisation précis pour mesurer les délais infimes entre l’émission et la détection. Les applications de navigation ont besoin de ces données sensorielles ancrées dans l’espace physique grâce à l’intégration avec des systèmes de positionnement.
Oui, il est essentiel d’affiner la coordination entre l’unité de balayage laser et le matériel de navigation pour que le LiDAR fonctionne. Les systèmes mondiaux de navigation par satellite (GNSS) fournissent des coordonnées géographiques (latitude, longitude, altitude). Une unité de mesure inertielle (IMU) détermine l’orientation du capteur en mesurant le tangage, le roulis et le lacet. Cette fusion technologique transforme les mesures brutes de distance en coordonnées tridimensionnelles géoréférencées.
La navigation LiDAR offre des avantages uniques. Elle fonctionne indépendamment des conditions d’éclairage ambiant. Cette technologie offre une précision centimétrique, comprise entre 15 et 25 cm, ce qui la rend idéale pour les applications de cartographie environnementale détaillée.
La navigation LiDAR a ses limites. Les signaux de cette technologie sont absorbés par l’eau, l’asphalte et les surfaces goudronnées. Le brouillard et une couverture nuageuse importante peuvent réduire les performances en dispersant les impulsions laser avant qu’elles n’atteignent leur cible. Malgré cela, le LiDAR reste essentiel dans les domaines de la navigation, qu’il s’agisse des véhicules autonomes, de la cartographie des drones ou du guidage des robots d’intérieur
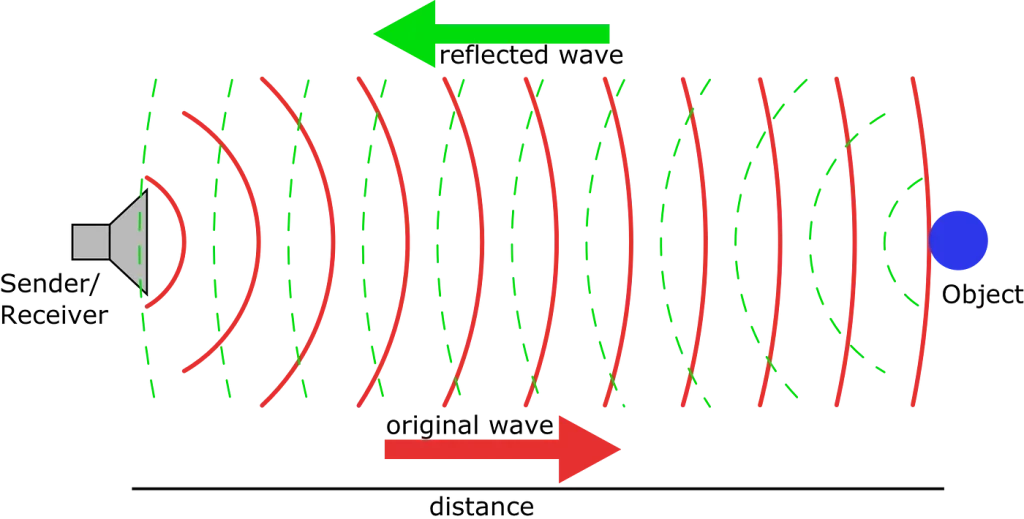
Principe de base de la mesure de distance par ondes réfléchies
Comment les systèmes LiDAR capturent et traitent les données environnementales
Les systèmes LiDAR modernes utilisent des mécanismes avancés qui transforment les données environnementales brutes en informations de navigation utiles. Ces systèmes utilisent des principes de mesure exacts et des techniques de traitement spécialisées pour convertir la lumière réfléchie en représentations spatiales précises.
Principes de mesure du temps de vol dans les systèmes LiDAR modernes
Le principe opérationnel de base de la technologie LiDAR repose sur la mesure du temps de vol (ToF). Cette approche permet de calculer les distances à l’aide de la formule d = (c × Δt)/2, où c représente la vitesse de la lumière et Δt le délai entre l’émission et la réception. Les impulsions laser rebondissent vers le capteur après avoir touché des objets, et le capteur mesure précisément cet intervalle de temps.
Les systèmes actuels utilisent deux méthodes principales de mesure du temps de vol. La méthode du temps de vol direct (dToF) mesure le temps de parcours réel des impulsions laser et convertit cette durée en mesures de distance. Cette méthode fournit des mesures de distance fiables et de faible puissance et reste accessible à un plus grand nombre de personnes en raison de la fiabilité de ses données et de son fonctionnement économique. Le temps de vol indirect (iToF) utilise des sources laser modulées en amplitude et mesure la différence de phase entre la lumière transmise et la lumière réfléchie. Le système convertit ensuite ce changement de phase en temps et en distance.
LiDAR à impulsions ou à ondes continues : différences techniques
Les systèmes à impulsions et à ondes continues représentent deux approches distinctes du fonctionnement du LiDAR. Les systèmes LiDAR à impulsions émettent de courtes salves de haute intensité qui ne durent que quelques nanosecondes ou microsecondes. Ces systèmes atteignent une puissance de crête élevée tout en maintenant une puissance moyenne faible. L’énergie concentrée nettoie efficacement les contaminants et fonctionne avec un meilleur rendement électrique car les impulsions sont émises de manière intermittente.
Le LiDAR à ondes continues (CW) crée un faisceau de lumière ininterrompu. Les systèmes à ondes continues modulées en fréquence (FMCW) utilisent des faisceaux laser « chirpés » qui émettent en continu avec des fréquences qui changent de façon cyclique. Les systèmes FMCW présentent un avantage majeur : ils mesurent la vitesse de l’objet directement par l’effet Doppler. Il n’est donc pas nécessaire de procéder à de multiples mesures, comme le font généralement les systèmes ToF.
Génération de nuages de points 3D à partir de données LiDAR brutes
Les données LiDAR brutes consistent en des points non filtrés et non structurés, présentés sous forme de données tabulaires avec des coordonnées et des attributs tels que les valeurs de réflectance. Le traitement transforme ces informations brutes en nuages de points 3D structurés qui représentent les environnements terrestres avec précision.
Le processus de génération suit plusieurs étapes clés. Le filtrage et le nettoyage du nuage de points suppriment les points incorrects grâce à des méthodes telles que le filtrage basé sur la densité, qui repère et supprime les points sur la base de l’évaluation de la densité locale. La classification des points permet d’étiqueter les points individuels comme étant du sol, de la végétation, des bâtiments ou d’autres éléments. La modélisation de surface crée des triangles et des polygones entre les points proches pour générer des modèles numériques d’élévation (MNE) et des modèles numériques de surface (MNS).
Les données utilisent généralement le format de fichier LAS standard (.las) ou sa variante compressée (.laz). Ces formats permettent de stocker et de transférer efficacement des millions de points provenant de scans LiDAR détaillés.
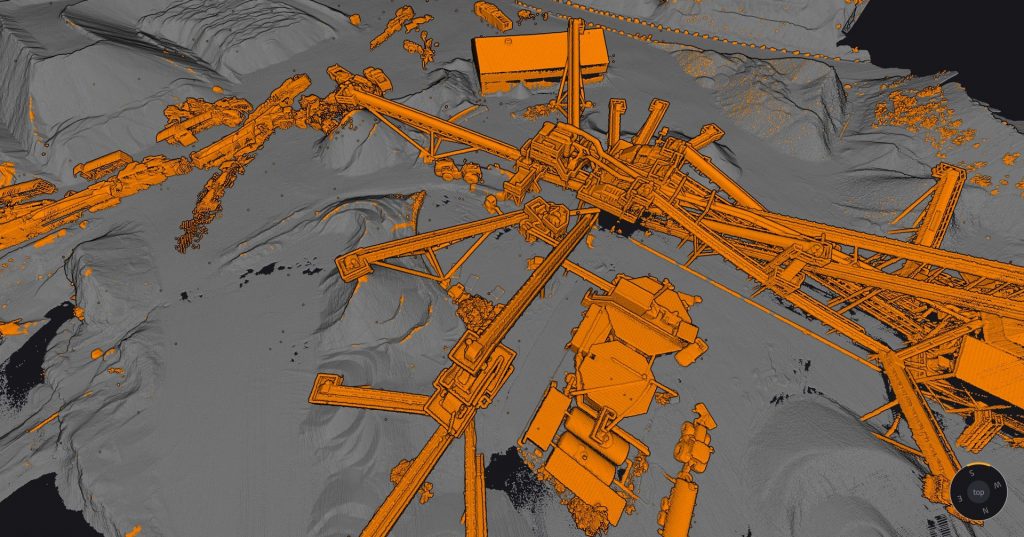
Site industriel scanné avec LiDAR pour la cartographie structurelle
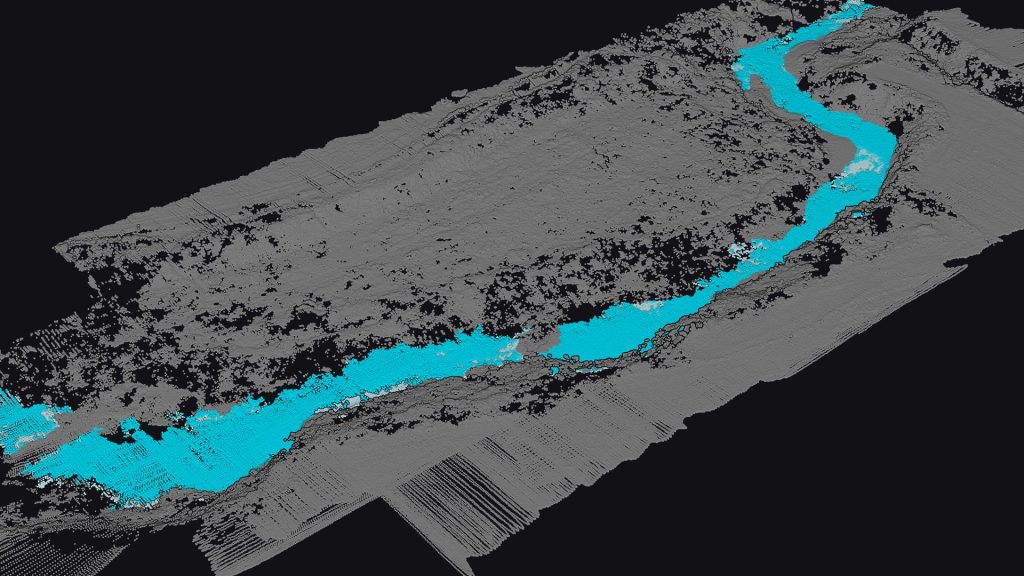
Cartographie des lits de rivière à l’aide de la classification des nuages de points LiDAR
Composants essentiels des systèmes de navigation LiDAR
Les systèmes de navigation LiDAR ont besoin de quatre composants matériels essentiels qui fonctionnent ensemble pour détecter et interpréter avec précision le milieu environnant. Ces composants ont des fonctions spécialisées qui permettent de créer des cartes spatiales précises pour la navigation robotique et les systèmes autonomes.
Émetteurs et récepteurs laser : Spécifications techniques
La source laser est au cœur de chaque système LiDAR et génère des impulsions d’énergie pour cartographier l’environnement. La plupart des systèmes LiDAR terrestres utilisent des longueurs d’onde proches de l’infrarouge (960-1550 nm), tandis que les systèmes aquatiques ont besoin de sources visibles de 532 nm pour pénétrer l’eau.
Les sous-systèmes récepteurs contiennent des détecteurs qui transforment les photons en courant électrique. Les systèmes de navigation LiDAR actuels utilisent trois technologies de détection principales :
- Photodiodes à avalanche (APD): Ces photodiodes fonctionnent en mode linéaire en dessous de la tension de claquage pour la détection standard.
- Diodes à avalanche à photon unique (SPAD): Elles fonctionnent en mode Geiger au-dessus de la tension de claquage et détectent les photons individuels avec une sensibilité exceptionnelle.
- Photomultiplicateurs au silicium (SiPM) : Ils connectent plusieurs SPAD en parallèle pour détecter le nombre total de photons.
La sensibilité du détecteur est liée au rapport signal/bruit et à la portée maximale. Le système a besoin d’une électronique de synchronisation précise associée à une détection sensible des photons pour déterminer la distance des obstacles à la navigation.
Mécanismes de balayage : LiDAR mécanique et LiDAR à semi-conducteurs
Les systèmes LiDAR mécaniques utilisent des pièces mobiles telles que des miroirs rotatifs ou des assemblages entiers pour balayer leur environnement. Ces pièces mobiles permettent un balayage large et dynamique, jusqu’à 360° horizontalement, et capturent de grandes zones de manière très détaillée. En revanche, les systèmes LiDAR à semi-conducteurs guident les faisceaux laser uniquement par des méthodes électroniques, ce qui supprime les pièces mobiles et améliore la fiabilité.
Les principales technologies à semi-conducteurs sont les suivantes
- 1. MEMS (systèmes micro-électromécaniques): Ils utilisent de minuscules miroirs qui se déplacent pour balayer les environnements et sont courants dans les applications automobiles.
- 2. OPA (Optical Phased Arrays): Il s’agit de véritables solutions à l’état solide qui ajustent la phase de la lumière pour diriger les faisceaux sans mouvement physique.
Les systèmes LiDAR hybrides combinent les deux technologies. Ils utilisent une direction électronique pour une couverture rapide tout en ajoutant des éléments mécaniques pour étendre la portée et améliorer la résolution. Les systèmes à semi-conducteurs sont plus fiables et plus compacts, mais les systèmes LiDAR mécaniques offrent une meilleure portée et une meilleure précision lorsque vous avez besoin d’une cartographie environnementale détaillée.
Matériel de traitement du signal pour la navigation en temps réel
L’architecture de traitement des signaux est cruciale pour la navigation LiDAR. Les systèmes modernes combinent un processeur, un système sur puce (SoC) et un réseau de portes programmables (FPGA) pour traiter les calculs de temps de vol et créer des nuages de points. Ces sous-systèmes de traitement relèvent des défis majeurs tels que la diaphonie des signaux, la saturation, le filtrage du bruit et les limites du taux d’échantillonnage.
Les applications de navigation nécessitent une prise de décision immédiate. L’architecture de traitement exécute des algorithmes avancés qui effectuent l’ajustement des courbes gaussiennes, le moyennage des formes d’onde, le filtrage numérique et la déconvolution afin d’extraire des données environnementales significatives. Les véhicules autonomes ont besoin de ce traitement rapide pour naviguer en toute sécurité à des vitesses opérationnelles.
Considérations relatives à la gestion de l’énergie et de la température
La gestion de la chaleur est un défi majeur pour les systèmes de navigation LiDAR. Les lasers ont un rendement d’environ 10 % et 90 % de l’énergie utilisée se transforme en chaleur au lieu de lumière. Cette charge thermique affecte plusieurs composants du système :
- Performance des diodes laser: Une chaleur trop importante entraîne un décalage des longueurs d’onde, une baisse du rendement et une dégradation plus rapide.
- Fonction de détection: Le bruit thermique réduit le rapport signal/bruit et la précision.
- Composants optiques: Les changements de température déforment les faisceaux et provoquent des désalignements.
Une bonne gestion de la chaleur fait appel à des méthodes de prévention et de transfert. La prévention se concentre sur la conception minutieuse des boîtiers et le choix des matériaux, tandis que les méthodes de transfert créent des voies conductrices entre les sources de chaleur et les surfaces externes. Les systèmes LiDAR à semi-conducteurs peuvent réduire leur augmentation maximale de température d’environ 20 % en optimisant le balayage du faisceau avec un simple refroidissement par air forcé.

Système LiDAR YellowScan Navigator pour la cartographie géospatiale avancée
Algorithmes SLAM : Le cerveau de la navigation LiDAR
Les logiciels qui interprètent les données LiDAR équipent tous les robots autonomes qui se déplacent dans des environnements complexes. Les algorithmes SLAM agissent comme le cerveau qui aide les machines à comprendre leur environnement et à connaître leur position exacte.
Principes de base de la localisation et de la cartographie simultanées
La navigation robotique est confrontée au problème classique de l’œuf ou de la poule : comment les machines peuvent-elles créer des cartes d’espaces inconnus tout en sachant où elles se trouvent sur cette même carte ? Ce défi est à la base des systèmes de navigation autonomes que l’on trouve dans les voitures auto-conduites et les robots d’entrepôt.
Le SLAM comporte deux processus principaux qui fonctionnent ensemble. L’étape de prédiction permet d’estimer la prochaine position du robot en fonction de son mouvement et de sa position actuelle. L’étape de correction affine ensuite cette estimation à l’aide de capteurs LiDAR qui mesurent les distances par rapport aux objets proches. Ces étapes sont répétées en permanence afin d’améliorer la précision de la position et de construire de meilleures cartes.
Les systèmes SLAM actuels fonctionnent de deux manières. Certains utilisent des méthodes de filtrage telles que les filtres de Kalman étendus et les filtres à particules pour calculer les positions probables du robot et cartographier les caractéristiques. D’autres adoptent une approche basée sur les graphes, créant des réseaux qui montrent comment les points de repère sont liés les uns aux autres dans l’espace. Les méthodes basées sur les graphes fonctionnent souvent mieux dans les environnements complexes.
Extraction de caractéristiques à partir de nuages de points LiDAR
Les données LiDAR brutes doivent être traitées avant que les algorithmes SLAM puissent les utiliser. L’extraction de caractéristiques transforme les nuages de points dispersés en motifs et en repères que les robots peuvent utiliser comme points de référence.
Le LiDAR SLAM recherche des formes géométriques dans les nuages de points, contrairement aux systèmes de caméras qui analysent les pixels. Les principales caractéristiques qu’il détecte sont les suivantes
- Arêtes et plans: Formes géométriques naturelles qui restent stables entre les balayages
- Coins et surfaces distinctes: Des repères uniques qui permettent d’aligner différentes vues
- Segmentation du sol: Distinguer les terrains plats des obstacles
Les ingénieurs utilisent différentes méthodes pour trouver ces caractéristiques. Des approches simples utilisent des opérations mathématiques pour repérer des modèles, tandis que la croissance des régions combine des points similaires pour en faire des objets. Des techniques avancées telles que le RANSAC permettent d’identifier les surfaces planes dans les nuages de points.
Une bonne détection des caractéristiques améliore le fonctionnement du SLAM. Les ingénieurs doivent trouver le bon équilibre entre des caractéristiques distinctes et un traitement rapide. Cet équilibre est particulièrement important lorsque les robots ont besoin de mises à jour en une fraction de seconde pour se déplacer en toute sécurité.
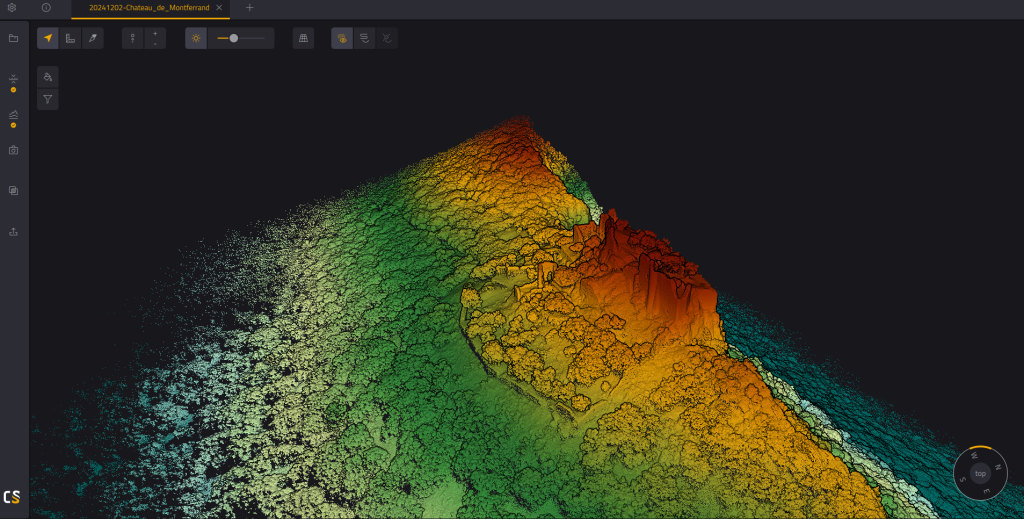
Nuage de points 3D du château de Montferrand affiché dans CloudStation
Applications avancées du LiDAR dans la navigation robotique
Les systèmes LiDAR ont dépassé le stade de la théorie pour permettre une navigation autonome au sol dans divers environnements. Ces systèmes de détection polyvalents permettent aux machines de voir, d’interpréter et de se diriger dans des environnements complexes avec une précision remarquable, qu’il s’agisse de rues urbaines animées ou d’espaces intérieurs dépourvus de GPS.
Systèmes de perception des véhicules autonomes
Le LiDAR est l’élément vital de la perception des véhicules autonomes modernes, qui permet une modélisation précise de l’environnement, même dans des conditions difficiles. Les systèmes LiDAR automobiles actuels peuvent détecter et classer plusieurs objets mobiles à la fois, y compris les piétons, les cyclistes et les autres véhicules. Cette classification permet de prendre des décisions de navigation sûres dans des scénarios de circulation complexes.
Le système fonctionne parfaitement dans les environnements peu éclairés et nocturnes, car le LiDAR n’a pas besoin de la lumière ambiante pour fonctionner. Le suivi des objets en direct permet aux véhicules d’être plus conscients de leur environnement, en particulier dans des conditions difficiles telles qu’une faible luminosité ou des conditions météorologiques défavorables.
L’intégration du LiDAR dans l’automobile nécessite à la fois un placement physique et des algorithmes logiciels intelligents. Ces algorithmes traitent les données du capteur et extraient des informations utiles sur la détection, la classification et le suivi des objets. Les développeurs combinent généralement le LiDAR avec des caméras, des radars et des GPS pour construire des systèmes de perception complets qui compensent les limites des capteurs individuels.
Navigation des robots d’intérieur dans des environnements dépourvus de GPS
Les solutions basées sur le LiDAR permettent de positionner les robots mobiles avec une précision impressionnante à l’intérieur des bâtiments où la navigation par satellite ne fonctionne pas bien. Les systèmes modernes peuvent déterminer la position absolue à 2 cm près en utilisant des cartes en 3D comme références géométriques. Cette précision est inestimable dans les entrepôts, les usines et autres environnements industriels qui nécessitent une navigation précise.
La navigation LiDAR en intérieur utilise des algorithmes d’enregistrement pour aligner les observations actuelles sur les cartes géométriques en 3D. Cet alignement s’effectue par le biais d’algorithmes de correspondance des caractéristiques et d’algorithmes itératifs des points les plus proches (ICP). Ces techniques réduisent la distance point à point entre les mesures LiDAR et les cartes de référence, ce qui permet un positionnement précis sans signaux GPS.
La navigation à l’intérieur des bâtiments est un défi car les systèmes doivent traiter de grandes cartes de zones importantes tout en gérant des personnes en mouvement ou des meubles déplacés. Les bonnes solutions doivent traiter les données 3D plus de 20 fois par seconde pour fournir des mises à jour fréquentes de la position.
Cartographie aérienne par drone et évitement d’obstacles
Les systèmes LiDAR montés sur drone ont remodelé la cartographie du terrain en capturant efficacement des données topographiques détaillées. Les systèmes avancés peuvent collecter jusqu’à 1 million de points par seconde, ce qui permet de créer des modèles numériques d’élévation (MNE) à haute résolution nécessaires à l’analyse et à la planification de l’environnement.
Le LiDAR sert deux objectifs dans les vols autonomes : la cartographie de l’environnement et l’évitement des obstacles. La fonctionnalité d’évitement des obstacles utilise trois modules : la perception de l’environnement, le traitement des algorithmes et le contrôle des mouvements. Ce système combiné aide les drones à repérer les collisions potentielles et à prendre des mesures d’évitement de leur propre chef.
Les drones équipés de LiDAR fonctionnent exceptionnellement bien pour les inspections spécialisées telles que l’évaluation des tours de téléphonie cellulaire, la documentation des scènes d’accident et la surveillance de l’agriculture. Ces plateformes peuvent travailler en toute sécurité dans des environnements difficiles tout en recueillant des données spatiales précises qu’il serait dangereux pour l’homme de collecter.
Applications de navigation LiDAR marines et sous-marines
Les systèmes LiDAR bathymétriques sont des adaptations spéciales faites pour les environnements sous-marins. Ces systèmes utilisent des fréquences qui peuvent pénétrer l’eau – généralement une lumière verte d’une longueur d’onde de 532 nm au lieu de l’infrarouge proche utilisé sur terre. Cette lumière spéciale permet de cartographier les rivières claires et la bathymétrie des côtes peu profondes depuis l’air, ce qui élimine les risques liés aux levés sous-marins.
Les applications sous-marines vont au-delà de la mesure de la profondeur et incluent la cartographie détaillée de l’habitat benthique pour les études d’écologie marine. Les systèmes bathymétriques avancés peuvent mesurer des profondeurs allant jusqu’à 25 mètres avec une clarté exceptionnelle.

Rue urbaine animée (© Unsplash)

Études d’écologie marine (© Unsplash)
Principaux enseignements sur la technologie de navigation LiDAR
Principaux enseignements et perspectives d’avenir
La technologie LiDAR est l’élément vital des systèmes de navigation autonomes modernes. Elle associe des mesures exactes à un traitement intelligent des données. Le LiDAR aide les machines à créer des cartes détaillées de leur environnement et à connaître leur position grâce aux principes du temps de vol et aux algorithmes SLAM avancés.
Cette technologie polyvalente brille dans de nombreux domaines. Les voitures autonomes utilisent le LiDAR pour repérer et classer les objets instantanément. Les robots d’intérieur se guident eux-mêmes avec une précision étonnante, même sans GPS. Le LiDAR prouve sa valeur dans des tâches spécialisées telles que la cartographie de terrains sous-marins.
De nouvelles avancées techniques permettent de résoudre d’anciens problèmes. Les systèmes à semi-conducteurs fonctionnent de manière plus fiable que leurs équivalents mécaniques. Un meilleur traitement des signaux permet aux machines de voir à travers les interférences atmosphériques. Ces améliorations permettent de créer des outils de navigation plus puissants et plus efficaces pour chaque type d’application.
L’avenir de la navigation LiDAR est prometteur. Les nouvelles technologies telles que les réseaux optiques à commande de phase et les algorithmes SLAM plus intelligents redéfinissent les limites des systèmes autonomes. Les ingénieurs et les développeurs qui travaillent sur les robots, les voitures autonomes et la cartographie environnementale doivent comprendre ces concepts de base.
La navigation LiDAR évolue plus rapidement que jamais, l’innovation technique favorisant les utilisations dans la vie réelle. Un meilleur matériel s’allie à des algorithmes plus intelligents pour créer de nouvelles possibilités de navigation autonome sur terre, sous l’eau et dans les airs.
Questions fréquemment posées
Quel est le principe de base de la technologie LiDAR ?
La technologie LiDAR fonctionne selon le principe de la mesure du temps de vol. Elle émet des impulsions laser et mesure le temps de réflexion de la lumière sur les objets, ce qui permet de calculer avec précision les distances et de cartographier l’environnement.
Comment le LiDAR contribue-t-il à la navigation autonome ?
Le LiDAR permet la navigation autonome en créant des nuages de points 3D détaillés de l’environnement. Ces nuages de points sont traités à l’aide d’algorithmes SLAM, ce qui permet aux robots et aux véhicules de cartographier simultanément leur environnement et de déterminer leur position sur cette carte.
Quels sont les principaux composants d'un système de navigation LiDAR ?
Un système de navigation LiDAR se compose d’émetteurs et de récepteurs laser, de mécanismes de balayage (mécaniques ou à semi-conducteurs), de matériel de traitement des signaux et de systèmes de gestion de l’énergie. Ces composants fonctionnent ensemble pour capturer, traiter et interpréter les données environnementales à des fins de navigation.
Quelles sont les performances du LiDAR dans différents environnements ?
Le LiDAR est polyvalent dans divers environnements. Il excelle dans les véhicules autonomes pour la détection d’objets, la navigation intérieure dans les espaces dépourvus de GPS, la cartographie aérienne avec des drones et même les applications sous-marines à l’aide de systèmes LiDAR bathymétriques spécialisés.
Quelles sont les limites de la technologie LiDAR ?
Bien que très efficace, le LiDAR présente certaines limites. Le signal peut être absorbé sur certaines surfaces comme l’eau et l’asphalte, et ses performances peuvent se dégrader dans des conditions météorologiques défavorables telles qu’un brouillard épais ou une couverture nuageuse. En outre, le coût des systèmes LiDAR de haute qualité peut constituer une contrainte pour certaines applications.