LiDARの精度基準:業界テストが証明するもの

LiDARの精度は信頼できる空間データ取得の生命線です。基本的な概念は、LiDARの測定値が実際の実測値にどれだけ近いかを示しています。専門家がLiDARの精度を議論するとき、彼らはそれを範囲(±2cm)または標準偏差(3cm~1σ)として表現します。
LiDAR領域には、相対精度と絶対精度という2つの主な精度分類があります。相対精度は、同じデータセット内で互いに比較した測定値の精度を示します。相対精度は、”測定値が互いにどの程度正確か “という質問に答えるものです。この内部精度は、点群内の点を比較する際の信頼レベルを設定します。絶対精度は、LiDARデータが地球表面上の真の地理的位置とどのように一致しているかを測定します。これは簡単な質問に答えます:「私の測定値はどれだけ真の値に近いか?
既知の(測量された)ポイントと測定されたレーザーポイント間の統計的比較は、LiDARの精度を決定します。標準偏差と二乗平均平方根誤差(RMSE)は、業界で一般的な統計的尺度として機能します。地上コントロールポイントとLiDAR標高の差は、一般的に5~30cmの範囲である垂直精度を評価するのに役立ちます。
これらの要因はLiDARの精度に影響を与える:
- ハードウェア・コンポーネント – それぞれが距離または角度で表される精度値を持つ
- 誤較正やコンパスの偏りによる系統誤差
- 測定におけるランダムエラー/ノイズ
- 信号品質に影響を与える環境条件
- 処理アルゴリズムとフィルタリング方法
総合精度 = √[(GNSS誤差)² + (LiDARレンジ誤差)² + (レンジ * tan(INS誤差))² + (レンジ * tan(LiDAR-INS誤差))²]。
INSの角度誤差により、センサーからの距離が長くなるにつれて精度は低下する。このため、精度の数値がどの範囲から出たものかを理解することは重要です。最適な条件下では、高度1,200mで15cm以上の垂直精度が得られます。
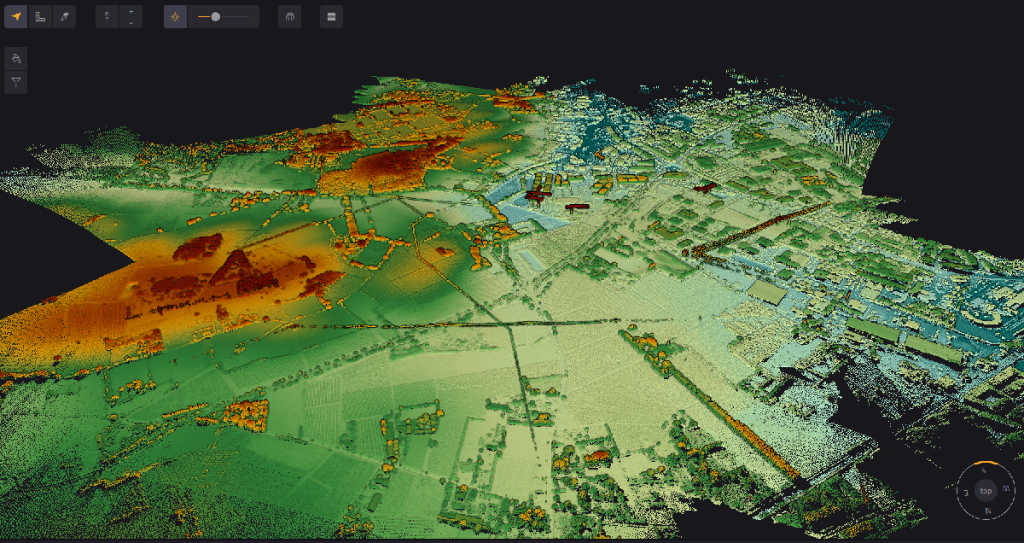
YellowScan CloudStationで生成された点群
業界で認められたLiDARの精度基準
10年前の標準規格は、あらゆる種類の産業においてLiDARの精度を保証する基盤を形成している。これらのフレームワークは、空間データの品質を正しく測定、報告、証明するための一貫した方法を提供します。
ASPRS精度分類システム
米国写真測量リモートセンシング学会(ASPRS)は、LiDARの精度を評価するための最も完全で利用しやすい基準を提供しています。デジタル地理空間データのためのASPRS位置精度基準、第2版は2023年8月に承認を受けました。この版は、デジタルマッピングのガイドラインを先導した2014年の初版を更新したものです。
改訂された基準には、いくつかの重要な改善点がある:
- 95%信頼水準での精度測定はもう必要ない
- 地上管制点の目標精度の要件が、従来の4倍から2倍になった。
- 精度を評価するために、チェックポイントの最低数が20から30に増えた。
第2版では、水平精度をRMSExとRMSEyの別々の値ではなく、RMSEH(半径方向の複合線形誤差)として表現するようになった。この規格では、少なくとも30個のチェックポイントをプロジェクトエリア全体に均等に配置することが義務付けられています。
地理空間データの精度に関するISO規格
国際標準化機構(ISO)はISO/TS 19159シリーズを通してLiDARの精度を扱っている。ISO/TS 19159-2は、特に「データキャプチャ方法、座標参照システムとそのパラメータ間の関係、エアボーンLiDARセンサーの校正」をカバーしています。このテクニカルガイドは、陸地、氷、森林、水、大気など様々な分野でのアプリケーションのために、幾何学的、放射学的、特徴的な校正プロセスを標準化しています。
連邦地理データ委員会(FGDC)規格
FGDCは空間データ精度の国家基準(NSSDA)を作成した。この基準は、二乗平均平方根誤差(RMSE)を用いて地理空間データの位置精度を推定するものである。テストには、より精度の高い独立した情報源と、地理的範囲に分散した少なくとも20のチェックポイントが必要である。
2018年地理空間データ法は、FGDCを地理空間データ標準を策定する主導組織とした。連邦政府機関は地理空間データを収集または作成する際、これらの標準に準拠しなければならない。連邦政府以外の機関は、データ共有を容易にするためにこれらの標準を採用するよう奨励を受ける。
地球の位置に基づくデジタル地理空間データ
LiDARの精度はどのようにテスト・検証されるか
LiDARシステムは、相対精度と絶対精度の両方の測定について、その正しさを証明する厳格なテスト方法が必要です。完全な画像は、重要なアプリケーションで使用する前に、収集されたデータがプロジェクトの仕様と業界標準を満たしているという確信を与えます。
地上管制点の検証方法
地上基準点(GCP)は、LiDARデータの精度を証明するために、既知の座標を持つ基準マーカーとして機能する。これらの点は、処理ソフトウェアのタイポイントとして機能します。GCPは点群にスケールや方向を伝え、全体的なデータ品質の向上に役立ちます。GCPは、10%以下の勾配を持つ平坦な地形または均一な勾配の開けた地形に設置する必要があります。垂直方向のアーチファクトや急激な高低差は避けるべきです。
リアルタイムキネマティック(RTK)測量は、GCPを収集する最も迅速な方法を提供します。この手法では、静的基準局(ベース)と移動受信機(ローバー)の2つのGNSS受信機が必要です。ベースは補正データをローバーに送信し、GCPの位置を設定する際にセンチメートルレベルの精度(通常1~3cm)を提供します。
測量士は2種類のコントロールポイントを見分けなければならない:データ調整用のGCP(Ground Control Point)と、精度報告用のSCP(Survey Checkpoint)です。チェックポイントは、測量の処理方法を変更することがないため、検証のための独立性を保つことができます。
相対精度評価技術
相対精度は、「スワス間精度」または「スワス間整合性」とも呼ばれ、データ収集の重複領域が互いにどの程度一致しているかを示す。この内部的な幾何学的品質チェックは、主に重複する飛行経路間の垂直方向の違いに注目する。
評価プロセスにはいくつかの方法が用いられる:
- サーフェスベースの比較:地表面はフライトラインごとのPTD(point-to-digital)アルゴリズムから得られる。各サーフェスは、オーバーラップするすべてのフライトラインからの地上分類されたポイントと比較されます。差分は記録され、要約される。
- 統計分析:非植生地域内の複数の場所でオーバーラップの一貫性をチェックする必要がある。これらのエリアは、単一のリターンしかなく、傾斜が10度未満でなければならない。ポリゴンシェープファイルは、サンプルエリアを通してのスワス間の一貫性を示しています。このファイルには、最小差、最大差、RMSDz値などの属性が含まれています。
絶対精度測定プロトコル
絶対精度テストは、LiDARの測定値をより高い精度で独自に測量された地点と照合します。チームは、LiDARデータセットの標高を、垂直精度評価のために類似したx/y座標のチェックポイントの標高と比較します。
ASPRSの基準では、精度テストには少なくとも20のチェックポイントが必要とされているが、最新の基準では30が推奨されている。500平方キロメートルより小さい地域では、少なくとも20箇所の非植生垂直精度(NVA)と5箇所の植生垂直精度(VVA)のチェックポイントが必要である。
水平精度評価は、明確に定義された点の平面座標と、より精度の高い情報源からの座標を比較します。それにもかかわらず、測量されたコントロールポイントは、LiDAR由来の標高データの絶対水平精度を推定するのにはうまく機能しません。点群データは高解像度の画像に比べて疎な性質があるため、このような制限が生じるのです。
代替測定システムによる交差検証
LiDARデータを他の測定技術と比較することで、精度評価の信頼性が高まります。トータルステーションは、GPSよりも優れた精度を提供するため、検証をリードしています。GPSの精度は、基点の距離、観測時間、衛星の形状に依存します。
CloudCompareのようなソフトウェアは、異なる方法による点群を比較するのに役立ちます。ある研究では、USGS LiDARとトータルステーション測定によるGPCを比較した。その結果、平均2次元(X,Y)差は2.2インチ、平均3次元(X,Y,Z)差は5.9インチであった。
写真測量のクロスバリデーションは、同じ画像を異なるGCPソースで処理することで機能する。このプロセスでは、等価点ペアツールを使用して並べ、平行移動とヨーのパラメータのみを調整して標高差をチェックします。この方法は、多くの現場設備や現場訪問を必要とせずに精度を検証するのに役立ちます。
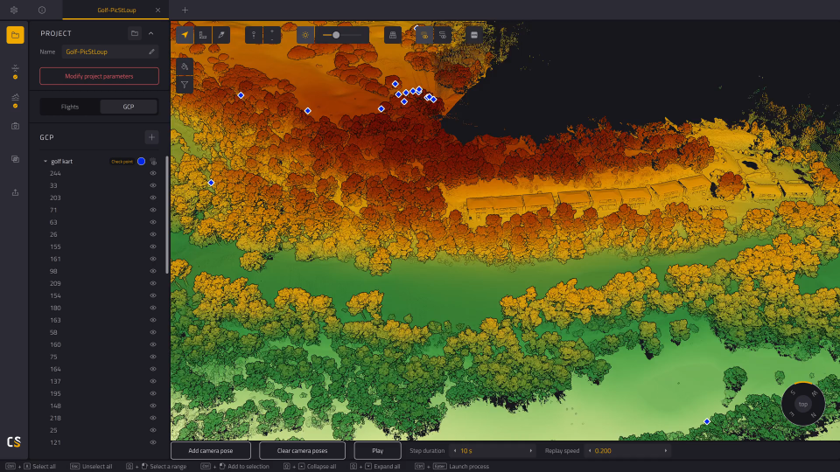
クラウドステーションGCPパラメータ
LiDARスキャナーの精度に影響する主な要因
LiDARシステムの精度は、複数の技術的変数と環境変数の間の複雑な相互作用に依存しています。現実の条件下でより良い精度を達成するために、実務者はこれらの影響を理解する必要があります。
ハードウェアの仕様と制限
センサー部品の品質は測定精度に影響する。ハイエンドのLiDARセンサーは低品質のものよりも精度が高い。信頼性の高いデータを得るためには、適切なキャリブレーションが必要です。小さなキャリブレーションエラーは点群全体に広がり、全体的な精度を低下させます。
不正確なGNSSとIMUデータは、最終的な点群のジオリファレンスに直接影響します。航空機システムの飛行姿勢(ロール、ピッチ、ヘディング)は、収集中にセンサーが予期せず回転すると誤差を生じます。飛行高さは精度に直接影響しませんが、点密度が変化するため、複雑な地形での精度に影響します。
環境と大気条件
天候はLiDARの運用に大きな課題をもたらします。レーザー信号は雨、霧、塵によって散乱または吸収されるため、測定値が悪くなる。降雨量が多い場合でも、測距値は安定しており、その変化は通常20cm以下である。
湿度による空気密度の変化はセンサーの較正に影響を与える。極端な温度は、ドローンの動作とセンサーの性能の両方を変化させる。システムは直射日光の強度と波長の重複による問題に直面する。
データ処理アルゴリズムとフィルタリング
高度なフィルタリングアルゴリズムにより、生の点群からノイズ、外れ値、不要な点を除去し、精度を向上させます。データの精密化には、ボクセル・グリッド・フィルター、統計的外れ値除去、半径外れ値除去などの異なるアプローチを使用します。
高低差のある地域では、アルゴリズムが地面の点とそうでない点を簡単に見分けることができないため、地面のフィルタリングが難しくなります。単純なノイズフィルタリング手法では、静的な背景要素と動的なオブジェクトをうまく分離できない。カルマンフィルターと機械学習アプローチは、これらの問題を解決するために分類精度を向上させるのに役立ちます。
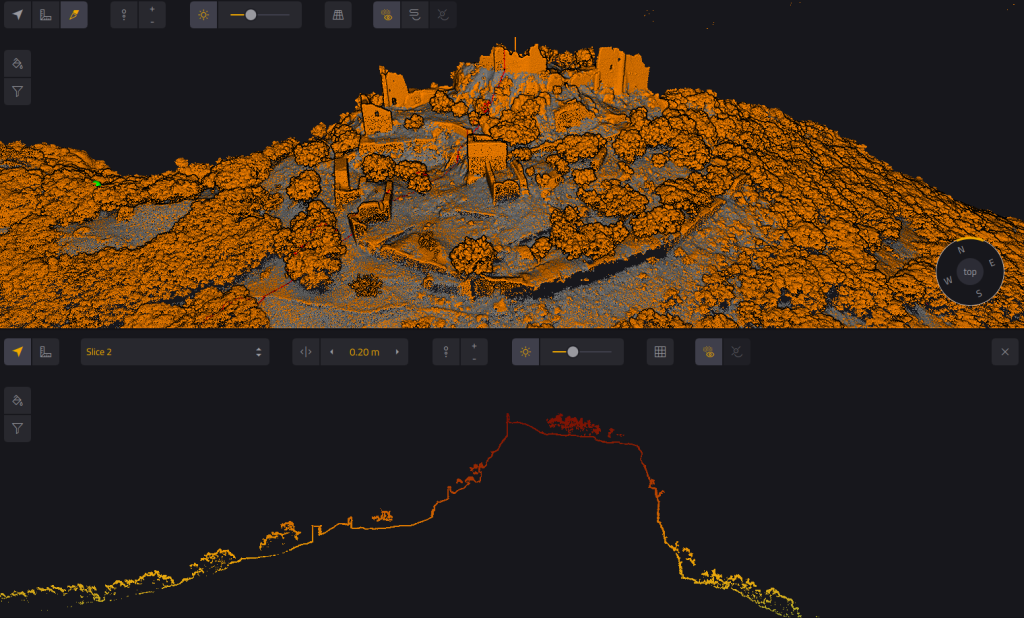
YellowScan CloudStationソフトウェアでのモンフェラン城のスライス
LiDARの精度に関する一般的な問題と解決策
LiDARの配備は、チームがデータ品質に影響を与える可能性のある特定の精度の問題を認識し、解決したときに最もうまくいきます。技術は進歩していますが、いくつかの基本的な限界はまだ存在しています。チームは慎重な校正と処理技術によって、これらに対処しなければなりません。
系統的エラーと校正の問題
LiDARシステムでは、系統誤差が大きな課題となっている。これらの予測可能な測定偏差は精度を損ないます。誤差は主にボアサイトミスアライメント(LiDARセンサーとオンボードGPS/INS座標系間の角度オフセット)によって現れます。このミスアライメントは、UAV-LiDAR操作における最大の系統誤差を生み出します。飛行高度とスキャン角度はその影響をさらに悪化させます。
誤較差は、航空システムにおいて2つの重要な方法で点群再構築に影響を与えます。ボアサイト誤差は、重なり合うフライトライン間にギャップを生じさせ、同じような地上位置の標高値に一貫性がなくなります。また、これらの誤差は、センサーからの距離が長くなるにつれて大きくなる歪みを生じさせます。
効果的なキャリブレーションを行うために、チームは主に2つのアプローチを用いる:
- 本質的校正は、既知の寸法を持つ校正ターゲットを使用して、レーザービームのアライメントを含むLiDARセンサーの内部パラメータに作用する。
- 外部キャリブレーションは、LiDARをカメラやレーダーのような他のセンサーとマッチングさせ、正確なデータフュージョンを保証します。
研究によれば、適切なキャリブレーション技術を用いれば、再投影、回転、距離の誤差を大幅に減らすことができる。そう、専門家がストリップ・アライメント・ソフトウェアを使うのは一般的なことだ。これは、ミッションを通して位置と角度を調整することにより、残った系統誤差を修正するのに役立ちます。
ランダムエラーとノイズ低減戦略
ランダム誤差は系統誤差とは異なる。測定過程における予測不可能な揺らぎから生じる。主な原因としては、光の離散的な性質による量子ノイズ(ショットノイズ)、電子のランダムな運動による熱ノイズ、アナログ検出時の光電子増倍管からの過剰ノイズなどがある。
点群ノイズはランダムな誤差を明らかにします。これは、フル解像度LiDARの平均勾配値を見るとわかります。これらの値は平坦な地面でも異常に高く見えます。これは、垂直方向の精度(通常12~15cm)が、近くのポイント間に24~30cmのランダムな高低差を生み出すためです。水平方向にわずか1メートルしか離れていない点は、信号処理の専門家が「高周波ノイズ」と呼ぶものを発生させます。
チームはノイズを減らすことができる:
- 空間分布パターンに基づいて外れ値を検出・除去する統計的フィルタリング
- 水平方向のサンプル密度と垂直方向の精度の比率を高めるウィンドウサイズ・フィルタリング
- 大気変動の影響を排除したランダム誤差を推定するNSF(ノイズ・スケール・ファクター)法
厳しい環境下での精度劣化
現実の状況は、様々な環境要因を通してLiDARの性能に影響を与えます。雨、霧、埃はレーザービームを散乱または吸収するため、不完全または誤ったデータにつながります。霧は水粒子の散乱により精度に影響を与えます。雨は信号強度と点密度の両方を変化させます。
反射面はLiDARシステムにとって特別な課題を生む。光ビームは鏡のような物体やガラスの壁によって歪められ、正確な距離測定を不可能にします。このような歪みは、同時定位とマッピング(SLAM)にエラーを引き起こす。これは、自律走行車アプリケーションにおける事故リスクを高めます。
スペシャリストたちは、タフなコンディションでパフォーマンスを向上させるために、いくつかの戦略を用いている:
- リアルタイムで環境干渉を調整する適応型アルゴリズム
- LiDARとカメラ、レーダー、GPSを組み合わせたマルチセンサーフュージョン
- 低強度外れ値除去(LIOR)や動的距離強度外れ値除去(DDIOR)などの高度なフィルタリング技術

雲海の上をスキャンする固定翼ドローンに搭載されたYellowScan LiDAR。
LiDAR精度基準の将来
LiDARの精度基準は、技術の進歩やアプリケーションの拡大とともに進歩し続けています。米国写真測量リモートセンシング学会(ASPRS)は、デジタル地理空間データの位置精度基準の第2版を発表しました。RMSEzはRMSEVに、RMSEx/RMSEyはRMSEHに統合された。新基準では、精度の尺度として95%信頼水準に言及しなくなり、地上基準点に対する要求も厳しくなくなった。
最先端の技術開発により、精度はかつてないほど向上しました。コヒーレント・ドップラーLiDARシステムは現在、速度で毎秒0.8センチメートル、距離で0.8メートルを上回る測定精度を実現している。次世代のセンサーは、より遠距離でセンチメートルレベルの精度を達成し、測量、建設、自律航法などのアプリケーションを向上させます。
ソリッドステートLiDARは、可動部品をなくすことで信頼性を向上させるという根本的な変化をもたらします。この進歩により、システムの耐久性が向上し、現実の3Dマッピング能力が向上する。複数のメーカーが、LiDARだけで物体追跡で99.9%、物体認識で98.9%の精度を達成する技術を発表している。
AIの統合は、LiDARが精度の面で達成できることを再形成する。AI主導のアルゴリズムは、物体認識を自動化し、点群フィルタリングを改善し、最新の意思決定を最適化します。これらの改善により、雨や霧のような厳しい気象条件への対応が向上し、あるソリューションでは豪雨時の検出可能距離が20mから40mに倍増した。
将来の標準規格には、マルチスペクトルLiDARの機能が含まれる可能性が高い。高精度システムは、小型化傾向のおかげで様々な産業で利用できるようになってきている。
将来のLiDARシステムの精度は、依然として校正パラメータ、ポイント密度、飛行パラメータ、データ処理技術に依存する。現在、研究はレンジ、解像度、リアルタイム実行、電力効率、より深いAI統合の改善に焦点を当てている。
よくある質問
LiDARの精度は通常どのように評価されるのか?
LiDARの精度は、一般的に座標がわかっている地上基準点(GCP)を使って評価されます。測量士はLiDARの測定値をこれらの独自に測量された点と比較し、通常、プロジェクトエリア全体で最低20~30箇所のチェックポイントを必要とします。精度を定量化するために、二乗平均平方根誤差(RMSE)のような統計的尺度が使用されます。
最新のLiDARシステムはどの程度の精度を達成できるのか?
最新のLiDARシステムは、驚異的な範囲精度を達成することができます。ハイエンドのセンサーは、センサーに対して0.5~10mmの精度を達成することができ、マッピング精度は水平方向で最大1cm、垂直方向で最大2cmです。先進的なシステムの中には、より遠距離でセンチメートルレベルの精度に近づくものもあります。
LiDARデータ保存のための業界標準のファイル形式は?
LAS(LASer)とLAZ(圧縮LAS)ファイルフォーマットは、LiDARデータを保存・共有するための業界標準として広く認知されています。これらのベクターフォーマットは、点群データを効率的に保存し、多くのソフトウェアツールと互換性があるため、測量およびマッピング業界における相互運用性に不可欠です。
環境要因はLiDARの精度にどのような影響を与えますか?
環境条件はLiDARの性能に大きく影響します。雨、霧、ほこり、極端な温度などの要因は、レーザー信号を散乱または吸収し、測定精度を低下させます。例えば、激しい降雨は、特に舗装のような表面をスキャンする場合、リターンの強度と検出されたポイントの数を減少させる可能性があります。
LiDARの精度向上においてAIが果たす役割とは?
人工知能はLiDARの精度をますます高めています。AI主導のアルゴリズムは物体認識を自動化し、点群フィルタリングを改善し、リアルタイムの意思決定を最適化します。これらの進歩により、システムは厳しい環境条件を補正できるようになり、豪雨のような悪天候でも検出可能な距離が2倍になるソリューションもあります。