自動車用LiDAR:コアテクノロジーを理解する

光検出と測距(Light Detection and Ranging:LiDAR)技術は、自律走行車の “目 “を動かす。LiDARの原理を理解するのはとても簡単だ。システムは、レーザーパルスが物体から跳ね返ってセンサーに戻ってくるまでの時間を測定する。このシンプルなコンセプトは、約0.1度の空間分解能という非常に高い精度で詳細な3Dマップを作成する。
LiDARシステムは、自動車、航空機、UAVのいずれに搭載されるかにかかわらず、4つの主要コンポーネントを統合している:
- レーザートランスミッター:特定の波長(850nm、905nm、1550nm)の赤外光パルスを送信する。
- 受光器:反射されたレーザーポイントをキャッチ
- スキャナー:レーザーポイントを「点群」にまとめ、3Dモデルを構築する
- 処理ユニット:空間データを正確な位置測定に変換
LiDARのスキャニング・プロセスは明確なステップを踏む。まず、レーザービームが発射され、タイミングクロックがスタートする。ビームは光学系を通り、物体に当たり、レシーバー光学系を通って跳ね返り、光を電気信号に変換するフォトディテクターに到達し、最終的に点群形式のデジタルデータとなる。
現在、車載用LiDARシステムには主に2つの方式が採用されている。直接飛行時間法(dToF)は、光の移動時間を測定することで距離を計算する。FMCW(Frequency Modulated Continuous Wave:周波数変調連続波)は、送信レーザー波と受信レーザー波の周波数差を測定する。FMCWは、ドップラー効果を利用して速度を測定できる。
LiDARが自律走行車にとって傑出しているのは、優れた奥行き知覚で車の周囲すべてを「見る」ことができるからだ。カメラが動作するには光が必要だが、LiDARは完全な暗闇や厳しい天候でも同様に機能する。この技術は、車や人からサッカーのヘルメットのような小さなものまで、さまざまな物体を高い精度で見つけることができる。
車載用LiDARには、200~300メートル先を見通すことが安全要件として求められている。この範囲であれば、時速60マイル以上で走行する車両が障害物に安全に反応することができます。IEC 60825-1規格はレーザー出力を制限しており、メーカーが使用できる波長に影響を与えます。
LiDARレーザーパルス生成
LiDARシステムは、周囲をマッピングするためにレーザーパルスを必要とします。この後、このパルスが車載アプリケーションにおける正確な3Dマッピングの基礎をどのように作るかを学びます。
車載用LiDARにおけるレーザー生成の理解
LiDARはユニット内のレーザー光源から始まる。この光源は、ナノ秒からマイクロ秒の短い光パルスを発生させる。環境に到達する前に、これらのパルスはビームコントローラーと光学システムを通過する。
レーザーパルスを発生させる方法は主に2つある:
- パルス飛行時間(ToF):特定の時間に個別の光パルスを送る
- 周波数変調連続波(FMCW):周波数パターンが変化する安定したビームを生成
LiDARシステムは3種類のレーザー光源を使用し、それぞれにユニークな利点がある:
- 端面発光レーザー(EEL):905nmのシステムで人気があり、良い価値を提供するが、スペクトル的に安定性が低い。
- 垂直共振器面発光レーザー(VCSEL):優れた温度安定性(EELの0.25nm-K-¹に対して0.06nm-K-¹)
- ファイバーレーザー:1550nmのシステムで使用され、ビーム品質は最高ですが、コストが高くなります。
850nm、905nm、1550nmの選択
| 波長 | 目の安全性 | レンジ能力 | コスト要因 | 天候性能 |
|---|---|---|---|---|
| 850nm | 限定的 | 中程度 | 低い | バランス |
| 905nm | 限定的 | 200mまで | より低い | 雨/雪に強い |
| 1550nm | より高い | 350mまで | より高い | 霧に強い |
目の安全性は、波長によって最も大きな違いが生まれます。400~1400nmの光は網膜に到達し、ダメージを与える可能性がある。しかし、1400nm以上の波長は目の表面で止まるため、より安全です。この安全性の利点により、1550nmのレーザーは905nmのものより40倍の出力を使用することができます。
脈拍数とエネルギー:適切なバランスを見つける
最新のLiDARシステムは、50kHzから2MHzのレートでパルスを発射する。より高いレートはより高密度の点群を作成し、3Dマップの詳細を表示する。
目の安全規則はパルスエネルギーに厳しい制限を設けている。IEC 60825-1規格は、車載用LiDARがクラス1の安全レベルを満たすことを要求している。これにより、905nmのシステムは約100メートルの範囲に制限される。
パルス幅も重要だ。パルス幅を短くすれば分解能は向上するが、ノイズが増える。ほとんどのシステムでは、これらの要因のバランスをとるために数百ピコ秒のパルスを使用している。

4台の360°LiDARスキャナーを使った自律走行車のテスト(© Unsplash)
LiDARの帰還信号検出を理解する
LiDARシステムは、物体から跳ね返ったレーザーパルスをキャッチして処理しなければなりません。これらの微弱な光信号が、どのようにして3Dマッピングに役立つ電気データになるのか、この後の説明で学びます。
LiDAR受光素子の種類と機能
LiDARレシーバーは、フォトディテクターと呼ばれる特殊な光感知装置を使用している。これらは入射光をコンピューターが理解できる電気信号に変換する。現代の自動車用LiDARでは、主に3つのタイプが使用されている:
アバランシェ・フォトダイオード(APD)は、2つの効果を利用して光を電流に変える:
- 光電効果で光をキャッチ
- 内部逓倍で信号を増幅
シリコンAPDは近赤外光によく効き、コストも低いが、InGaAs APDはより長い波長(1550nm)をとらえるが、コストは高い。
単光子アバランシェ・ダイオード(SPAD)は仕組みが異なる:
- 高い逆電圧で「ガイガーモード」を使用する
- 単一光子の検出が可能
- 非常に正確な時間測定(ピコ秒)
- 測定と測定の間に400ns~1μsの “休止時間 “が必要
シリコンフォトマルチプライヤー(SiPM)は最新のソリューションを提供します:
- 古いAPDを905nm光用に交換
- 小さなSPAD細胞を多数含む
- 優れた信号増幅
- 正確な光子数を数える
システムによっては、より長い波長用の特別なInP/InGaAs検出器が必要になる。これらは非常に低温(-60℃以下)に保たなければならず、不要な信号が多く発生する。
弱い信号を使えるようにする
光検出器に到達する光信号は、非常に弱いものから始まります。トランスインピーダンス・アンプ(TIA)は、微小な光電流を測定可能な電圧に変えることで、この問題を解決する。
今日のTIAは素晴らしい性能を達成している:
- 0.2 fA/√Hzまでのノイズレベル
- 最大10^13 V/Aのゲイン
最近のTIAには、いくつかの便利な機能が搭載されている:
- 不要な環境光を除去する光フィルター回路
- 保護システムが信号の過負荷に対応
- チャンネル・スイッチで必要な部品を削減
ノイズの管理は最大の課題である。3つの主なアプローチは、より明確なシグナルを得るのに役立つ:
- より強いレーザーパルスの使用
- 検出器の高感度化
- ノイズの除去
高度なフィルターは、変化する状況に適応する統計とスマートなアルゴリズムを使用する。これらは、複雑な計算を必要とするにもかかわらず、自動車用LiDARのために即座に機能しなければならない。

LiDARで生成された3D環境マップを自律走行車からリアルタイムでオブジェクトを検出
飛行時間測定:LiDARが距離を計算する方法
LiDARの原理を理解するのはとても簡単だ。このタスクは主に2つの方法で処理され、それぞれ異なる動作と独自の利点を提供します。
ダイレクト・タイム・オブ・フライト(dToF)法
dToFは、レーザーパルスを送信してからその返送をキャッチするまでの正確な時間を測定する。距離は往復時間の半分に光速を掛けたものに等しい。しかし、タイミングは完璧でなければならない。1ナノ秒ずれるだけで、距離に15センチの誤差が生じる。
今日の自動車用dToFシステムは、2つの方法で機能する:
- シングルショットモード:1つのパルスを発射し、その戻り時間を測定
- マルチショットモード:多くのパルスからタイミングパターンを作成し、よりクリアな信号を得る
システムには、信号を処理するために、タイム・デジタル・コンバーター(TDC)またはアナログ・デジタル・コンバーター(ADC)が使用される。ADCシステムはコストが高いが、単純なタイミングを超えた高度な検出方法を実行できるため、より効果的である。
FMCW LiDARを理解する
FMCWは、自動車で人気を集めている異なるアプローチを提供する。個別のパルスの代わりに、パターンで周波数を変化させる連続的なレーザー波を送信する(チャープ光と呼ばれる)。送信された光と戻ってきた光の周波数差(ビート周波数)により、ターゲットの距離がわかる。
FMCWにはいくつかの利点がある:
- ドップラー効果で距離と速度を一度に測定
- 同じレンジでdToFより少ない消費電力
- 複数のLiDARが近くで動作している場合、より効果的に機能する
- タフなコンディションでも優れたパフォーマンスを発揮
天候がLiDARの精度に与える影響
天候はLiDARの性能に大きな影響を与えます。雨は2つの問題を引き起こします:
- 雨粒はターゲットに到達する前にパルスを反射する
- 雨粒に当たると距離測定が狂う
霧はLiDARにとって最大の頭痛の種だ。霧に含まれる水分子はあらゆる場所で光を散乱させるため、実際の物体と水滴を見分けるのが難しくなる。霧が濃くなるにつれて性能は悪化し、降雨量10mm/hでセンシングが失敗し始め、50mm/hで機能しなくなる。
雪は光を反射・散乱させることで同様の問題を引き起こす。晴れた日でも、明るい日差しは、そこにないものを見るようにシステムをだますことがある。
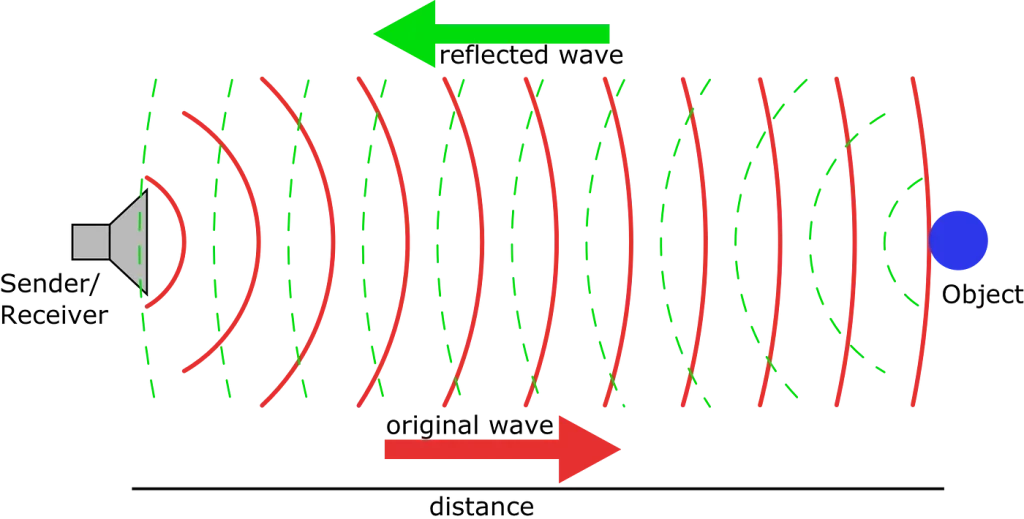
波の反射を利用した距離測定の基本原理
LiDARデータからの3D点群作成
LiDARスキャナーは3D点群データを取得する。しかし、これらの距離測定はどのようにして有用な3Dモデルになるのでしょうか?このセクションでは、生データが車両のナビゲーションに役立つ詳細な地図にどのように変換されるかを説明します。
点群の構築 ステップ・バイ・ステップ
LiDARシステムは主に2つの情報を収集する:
- 光の移動距離
- 戻ってきた信号の強さ
このデータは3D点群、つまりセンサー周辺のすべての詳細な地図となる。
さまざまなアルゴリズムが、点群生成における特定のタスクを処理する:
- フィルタリングアルゴリズムが乱雑なデータを一掃
- セグメンテーションアルゴリズムは、類似点をグループ化する
- 地盤検知は重要な特徴を見つけるのに役立つ
自動車では、クラスタリング・アルゴリズムが特に有用である。リアルタイム点群クラスタリングアルゴリズム(RTPCC-RL)は、ポイントを距離でソートして高速に処理します。この方法では、精度を保ちながら、わずか100ミリ秒でデータを処理します。
点群の品質を理解する
ポイント密度は3Dマップの詳細度を示します。1平方メートルあたりのポイント数(ppsm)で測定します。ジョブによって必要な密度は異なります:
- 駐車場:2~4ppsmで問題なし
- 車両の特定:8~16ppsmのニーズ
- 樹木研究:最初のリターンは最大50ppsm、合計200ppsmに達する
空間分解能は主に2つの事柄に左右される:
- 各レーザーパルスの広がり(IFOV)
- 物体の距離
より優れたLiDARシステムはこの点を巧みに処理している。あるものは可変解像度を使用し、中央は非常に正確(0.07°)である一方、周囲は合計28°を見ることができる。
リアルタイムで機能させる
Car LiDARは、膨大な量のデータを瞬時に処理するという難題に直面している。スキャンするたびに何百万ものポイントが生成され、それを素早く処理する必要がある。これは、自動車に搭載されているコンピューターのパワーが限られているため、厄介なことになる。
スピードは正確さと同じくらい重要だ。ヒストグラム処理のようないくつかの方法はうまく機能するが、多くの計算能力を必要とする。これを解決するのに役立つのが、主に3つのアプローチだ:
- 1.より良いデータ転送システム
- 2.特殊なデータ圧縮
- 3.グリッドベースの点構成
自動車が安全に走行するためには、ミリ秒単位で周囲の状況を把握しなければならない。今日のシステムは、衝突防止から道路標識の読み取りまで、さまざまな機能を可能にするため、この迅速な処理にますます磨きがかかっている。

計画されたナビゲーション経路を持つ3D LiDAR点群としてキャプチャされた都市の通り
LiDAR技術:次に来るもの
LiDAR技術は小型化、低価格化、高性能化を続けている。自動車用LiDARの売上は、2023年の5億3800万米ドルから2029年には3億6,300万米ドルに急増し、毎年38%の成長を遂げると予想されている。
ソリッドステートLiDARが前途をリードしている。現在、回転ミラーを備えたハイブリッド・システムが2024年予想売上の66%を占め、MEMSベースのシステムは32%を占めている。今後は、完全なソリッドステートLiDAR(特にフラッシュLiDAR)が市場の37%を占めるようになるだろう。これらのシステムは、よりよく機能し、メンテナンスの必要性が少なく、製造コストが低い。
LiDARの原理を理解するのは簡単だが、それを手頃な価格にするのは難しい。今日の長距離システムは約500米ドルもする。普及させるには、長距離用で300米ドル、短距離用で100米ドルを下回る価格にする必要がある。すでに500ドル以下のシステムを提供している中国メーカーもある。
現在のLiDARの主流は近赤外線(NIR)技術である:
- 2024年、905/940nmの波長が自動車用LiDARシステムの90%に搭載される見込み
- 近赤外光と短波長赤外光との間のこの分裂は、何年も安定したままであるべきだ
新しいアイデアが次々と生まれている。ひとつは、機械部品の代わりに音波を使ってレーザービームを操るものだ。これにより、LiDARシステムをコーヒーカップからマッチ箱サイズに縮小することができる。
FMCW LiDARは、より優れた距離と速度検出の可能性を示しているが、2027年から2028年までには自動車に搭載されることはないだろう。
より優れたハードウェアだけでなく、LiDARシステムも一緒に機能する:
- 5Gネットワーク
- 人工知能
- リアルタイム・マッピング・ツール
これらの進歩は、自動運転車の機能を向上させ、農業、海運、医療スキャンに新たな用途を生み出すだろう。
よくある質問
LiDAR技術はどのようにして自律走行車用の3D地図を作成するのか?
LiDARは、レーザーパルスを照射し、物体に反射してセンサーに戻ってくるまでの時間を測定することで3Dマップを作成する。このデータは、車両の周囲の詳細な点群表現を生成するために処理され、正確な距離と空間情報を提供します。
車載用LiDARシステムの主要コンポーネントは?
車載用LiDARシステムは通常、光パルスを発するレーザー送信機、反射光を捉える受光器、受信したポイントをクラスタリングするスキャナー、正確な位置を計算し3Dモデルを作成する処理ユニットの4つの主要コンポーネントで構成される。
LiDARは異なる気象条件下でどのように機能するのか?
LiDARの性能は悪天候の影響を受けることがあります。雨や雪は点群の密度と精度を低下させ、霧は光を拡散させノイズを発生させることで大きな課題をもたらします。しかし、LiDARは一般的に低照度条件下ではカメラよりも優れた機能を発揮し、多くの困難な環境でも貴重なデータを提供することができます。
自動車用LiDAR技術にはどのような進歩があるのでしょうか?
将来のLiDAR技術は、信頼性の向上と低コスト化を実現する可動部品のないソリッドステート・システムに焦点を当てている。その他の進歩には、距離と速度を同時に測定するFMCW(周波数変調連続波)LiDARの開発や、LiDARとAIおよび5Gネットワークの統合による機能強化が含まれる。
LiDARは自律走行車に使われる他のセンシング技術と比べてどうなのか?
LiDARは、従来のセンシング手法に比べ、優れた空間分解能と奥行き知覚を提供します。可視光に依存するカメラとは異なり、LiDARは暗闇や厳しい気象条件下でも効果的に機能します。また、さまざまな種類の物体を高い精度で区別できるため、自律走行ナビゲーションや障害物検知に不可欠な技術となっている。