YellowScan Navigatorによるルーマニア全域の水深調査

チャレンジ
海岸浸食からダムのモニタリングまで、ルーマニアでの水深測量は環境とロジスティクスに関するユニークな課題を伴います。黒海では、水の濁度が高く、GNSS信号が不安定であることが多いため、従来の水深測量ツールの精度が低下します。河川やダムのような内陸部では、強い流れ、急な堤防、アクセス制限など、独自の複雑な問題が発生します。
インフラ監視、考古学的調査、洪水モデリングに必要な洞察を得るために、測量チームは、高品質の地理参照付き3Dデータを提供しながら、困難な環境でも実行できるソリューションを必要としていました。

トポ・バイトメトリックLiDARシステム、YellowScan NavigatorをTundra 2に搭載
ソリューション
La OrizontのCiprian Iorga氏と国立地球物理学研究所のEduard Năstase氏は、これらの課題に対処するため、YellowScan LiDARシステムを組み合わせた。水中の地形マッピングのために、彼らはUAVベースの水深測定LiDARシステムであるYellowScan Navigatorを導入しました。水深データを補完し、完全な地形カバレッジを取得するために、Surveyor Ultra (V2)とVx20-300が、特に密生した植生や変化に富んだ地形でより高いポイント密度と精度が要求される場合に、同じサイトまたは隣接するサイトで使用されました。
これらのシステムを組み合わせることで、データの質やミッションの効率性を損なうことなく、水中と地上を完全にカバーすることが可能になった。
3つの異なるミッションがあった:
1- 黒海沿岸(マンガリア~ビーナスビーチ)
この沿岸モニタリング・プロジェクトでは、チームは沼地、海岸、浅い海洋環境、人工インフラを組み合わせた浸食が起こりやすい地域のマッピングに焦点を当てた。YellowScan Navigatorを使用することで、濁度の高い条件下でも水深5~6メートルまでスキャンすることができました。その結果、水深データはインフラ計画と海岸線管理をサポートした。
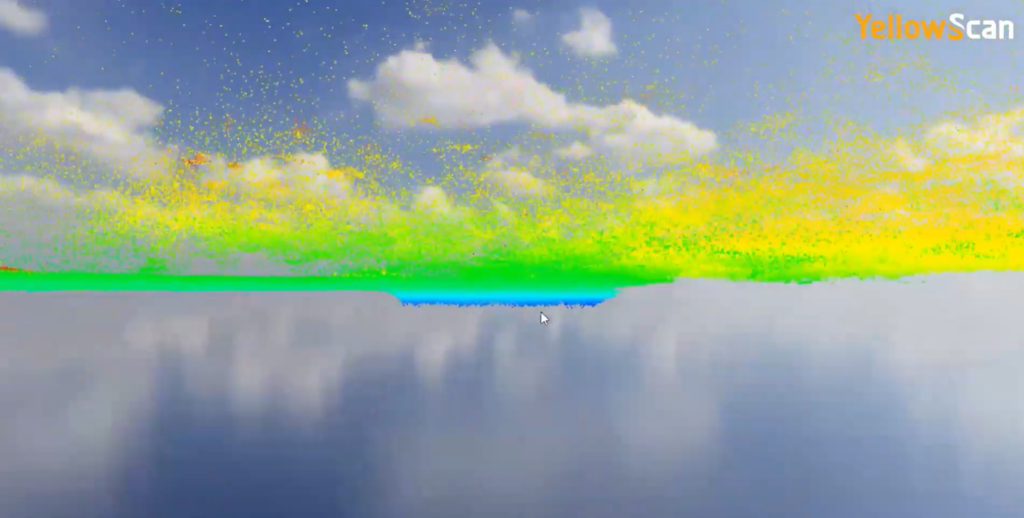
YellowScan水深測定LiDARを使って水面下にとらえた陥没穴のような可視的特徴。
ミッション・パラメーター
使用システム
- YellowScan Navigator
- イエロースキャン Vx20-300
どちらもタンドラ2ドローンに搭載された。
フライト数
- YellowScan Navigatorを使用した8フライト
- YellowScan Vx20-300で2フライト
調査エリア
- 陸面と水面の両方をカバーする約1km²の広さ
飛行パラメータ
- 高度:80メートル
- スピード:7 m/s
ミッションの期間
- 計画とデータ収集~8時間(丸1営業日)
- データ処理:~24時間
後処理ソフトウェア:
- YellowScan CloudStationとCloudCompare
2- ヒストリア古代都市
主な目的は、古墳周辺の水没遺跡と地表構造物の考古学的マッピングを行うことであった。この遺跡では、水深が浅く、GNSS信号が大きく乱れていたため、従来の調査方法には課題がありました。Navigatorは、このような制約にもかかわらず、使用可能な水深データを提供し、研究者が歴史的に重要な水中構造物を発見し、解釈するのに役立ちました。
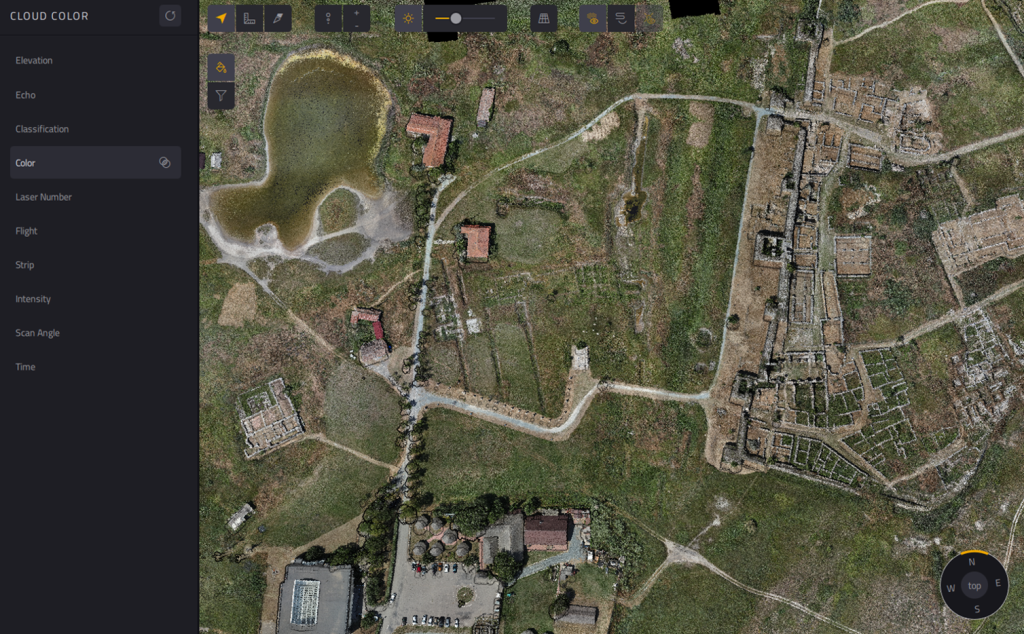
YellowScan CloudStationで処理された古代都市ヒストリアのカラー点群。
ミッション・パラメーター
使用システム
- イエロースキャン・ナビゲーター(タンドラ2に装着)
- イエロースキャンVx20-300(タンドラ2に装着)
- イエロースキャンサーベイヤーウルトラ(DJIマトリス300に搭載)
フライト数
- ナビゲーターによる5フライト
- Vx20-300で4フライト
- サーベイヤーウルトラで2フライト
調査エリア
- 約0.5km²、古代都市ヒストリアとその周辺の水域、沼地、古墳地帯を含む。
- さらに、補完的な情報として、写真測量データ取得のために約20km²のエリアが飛行された。
飛行パラメータ
- 高度:80メートル
- スピード:7 m/s
ミッションの期間
- 計画およびデータ収集:約2営業日(写真測量フライトの延長を含む)
- データ処理:約24時間
後処理ソフトウェア:
- YellowScan CloudStationとCloudCompare
3- アルゲシュ川とミハイレシュティ・ダム
この内陸部のミッションでは、地形と水深のLiDARデータを組み合わせて、洪水モデリングをサポートし、ダムとその周辺の川岸の構造的完全性を監視しました。航空測量と水深測量の統合により、包括的な水文学的分析が可能になり、将来のインフラに関する決定に役立つと同時に、河川付近の調査対象地域に関する考古学的情報も提供された。
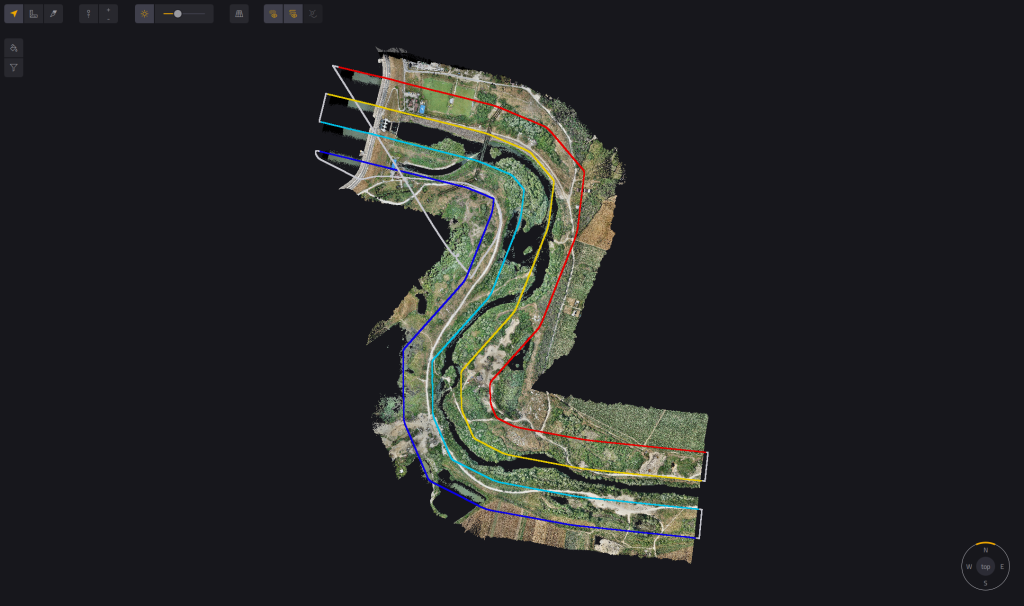
ダムのカラー化された点群とフライトプラン。
ミッション・パラメーター
使用システム
- YellowScan Navigator
- イエロースキャン Vx20-300
フライト数
- ナビゲーターによる4フライト
- Vx20-300で2フライト
調査エリア
- 約3.2 km²
飛行パラメータ
- 高度:80メートル
- スピード:7 m/s
ミッションの期間
- プランニングとデータ収集:約8時間(丸1営業日)
- データ処理:約24時間
後処理ソフトウェア:
- YellowScan CloudStationとCloudCompare
結果
これらのミッションを通じて、各チームは、UAVベースのLiDARが、従来は到達することもマッピングすることも困難であった地域で、いかに高精度のデータを解き放つことができるかを実証しました。YellowScan Navigatorは、視界が限られ、GNSSが干渉する状況下でも有効であることを証明し、信頼性の高い水深測定結果を提供しました。一方、Surveyor UltraとVx20-300は、完全なデジタル地形モデルを構築するための高密度で正確な地形データを提供しました。
La Orizontと国立地球物理学研究所は、両社のシステムを統合することで、文化遺産保護から洪水リスク評価まで、多様な測量ニーズに対応することに成功し、マルチセンサーUAV LiDARワークフローのパワーと柔軟性を浮き彫りにした。
「水の濁りやGPSの干渉という困難な状況にもかかわらず、Navigatorはインフラや考古学的分析に使える水深データを一貫して提供してくれました。

謝辞
この研究は、国家研究プログラム、プロジェクトSOL4RISC番号の支援を受けた。PN 23360301
