LiDARナビゲーション解説:基本原理から高度なアプリケーションまで

LiDAR(光検出と測距)は、現代のナビゲーション・システムの生命線として機能している。LiDARは、エレガントでありながら強力な動作原理により、正確な空間計測を提供します。パッシブ・センシング技術とは異なり、LiDARは物体に向けてレーザーパルスを積極的に照射し、センサーに戻ってくる反射時間を測定します。この飛行時間測定は、d = (c × Δt) / 2という式を使って正確な距離を計算するのに役立ちます。
ナビゲーションにおけるLiDARの威力は、環境データをより速く取得する方法を知っていることから生まれる。先進的なシステムでは、毎秒数百万サンプリングが可能です。このような高周波サンプリングは、3次元空間を驚くほど詳細に表現する高密度の点群データを作成する。
LiDARシステムの心臓部は、連携して動作するいくつかの重要なコンポーネントで構成されている。レーザーエミッターは短く焦点を絞ったパルスを発生させ、目標物に向かって進み、光検出器は後方散乱光を捉えます。システムは正確なタイミング機構を使い、発光と検出の間のわずかな遅延を測定する。ナビゲーション・アプリケーションでは、測位システムとの統合により、この感覚データを物理的空間に固定する必要がある。
はい、LiDARが機能するためには、レーザースキャニングユニットとナビゲーションハードウェア間の調整を微調整することが不可欠です。全地球航法衛星システム(GNSS)は、地理的座標(緯度、経度、高さ)を提供します。慣性計測ユニット(IMU)は、ピッチ、ロール、ヨーの計測を通じてセンサーの向きを決定する。この技術融合により、生の距離測定値が地理参照された3次元座標に変換される。
LiDARナビゲーションはユニークな利点をもたらす。周囲の明るさとは無関係に機能する。このテクノロジーはセンチメートルレベルの精度を実現し、精度は15~25センチメートルで、詳細な環境マッピング・アプリケーションに最適です。
LiDARナビゲーションには限界がある。この技術の信号は、水、アスファルト、タールの表面に吸収されてしまう。霧や重い雲に覆われると、レーザーパルスがターゲットに到達する前に分散され、性能が低下する可能性がある。それにもかかわらず、LiDARは自律走行車からドローンのマッピング、屋内ロボットのガイダンスに至るまで、ナビゲーションの領域で重要な役割を担っている。
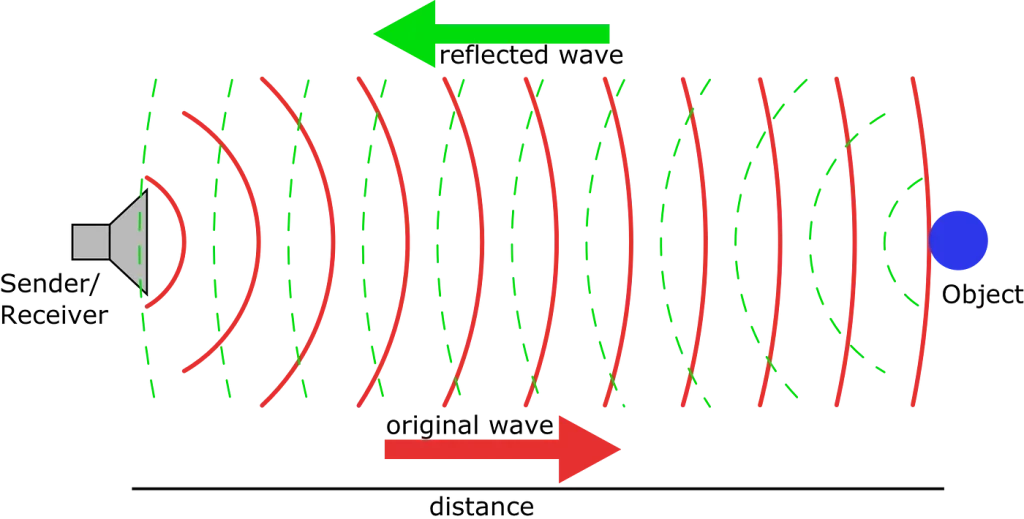
反射波を利用した距離測定の基本原理
LiDARシステムによる環境データの取得と処理方法
最新のLiDARシステムは、生の環境データを有用なナビゲーション情報に変える高度なメカニズムを使用しています。これらのシステムは、正確な測定原理と特殊な処理技術によって動作し、反射光を正確な空間表現に変換します。
最新のLiDARにおける飛行時間測定原理
LiDAR技術の中核となる動作原理は、飛行時間(ToF)測定にある。このアプローチでは、d = (c × Δt)/2の式を用いて距離を計算する。ここで、cは光速を表し、Δtは発光と受信の間の時間遅延を示す。レーザーパルスは物体に当たった後にセンサーに跳ね返り、センサーはこの時間間隔を正確に測定する。
現在のシステムでは、主に2つのToF方式が使われている。直接飛行時間法(dToF)は、レーザーパルスの実際の移動時間を測定し、この時間を距離測定値に変換する。この方式は、信頼性が高く、低消費電力で距離測定が可能で、データの信頼性が高く、低予算で運用できるため、より多くの人が利用できる。間接飛行時間法(iToF)は、振幅変調されたレーザー光源を使用し、透過光と反射光の位相差を測定します。システムはこの位相変化を時間と距離に変換する。
パルス波LiDARと連続波LiDAR:技術的な違い
パルスLiDARと連続波LiDARは、LiDARの操作における2つの異なるアプローチを表しています。パルスLiDARは、わずかナノ秒またはマイクロ秒の短い高強度バーストを放出します。これらのシステムは、平均出力を低く抑えながら、高いピーク出力に達します。パルスは断続的に放出されるため、集中したエネルギーは効率的に汚染物質を浄化し、より優れた電気効率で機能します。
連続波(CW)LiDARは途切れることのない光ビームを作り出します。周波数変調連続波(FMCW)システムは、周期的に変化する周波数で連続的に放射される「チャープ」光レーザービームを使用します。FMCWシステムには、ドップラー効果によって物体の速度を直接測定できるという重要な利点がある。このため、ToFシステムでは通常必要とされる複数の測定が不要になる。
生のLiDARデータからの3D点群生成
生のLiDARデータは、座標と反射率のような属性を持つ表データとして表示される、フィルタリングされていない構造化されていない点で構成されています。この生の情報を処理することで、地上環境を正確に表現する構造化された3D点群になります。
生成プロセスにはいくつかの重要なステップがある。点群のフィルタリングとクリーニングは、密度ベースのフィルタリングのような手法で不正な点を除去する。点の分類では、個々の点を地面、植生、建物、その他の要素としてラベル付けします。サーフェスモデリングは、近くの点間の三角形と多角形を作成し、デジタル標高モデル(DEM)とデジタルサーフェスモデル(DSM)を生成します。
データは通常、業界標準のLASファイル形式(.las)またはその圧縮型(.laz)を使用します。これらのフォーマットは、詳細なLiDARスキャンからの数百万のポイントを効率的に保存、転送します。
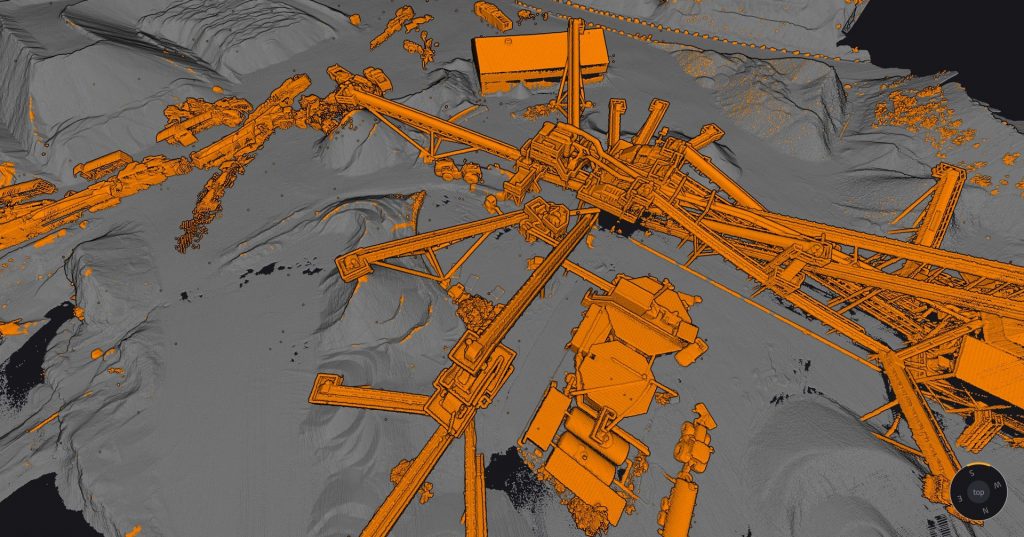
構造マッピングのためにLiDARでスキャンされた工業用地
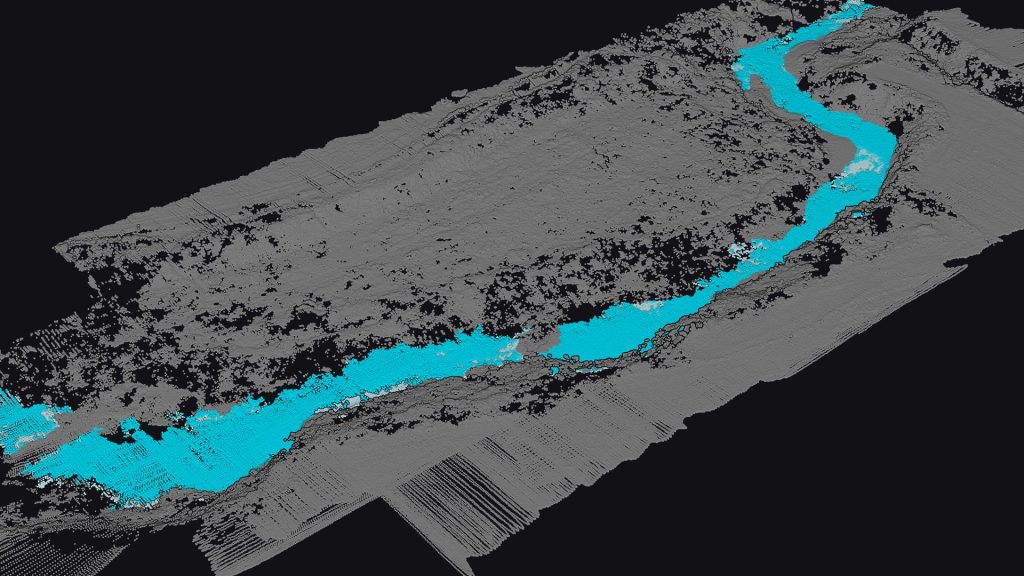
LiDAR点群分類による河床マッピング
LiDARナビゲーションシステムのコアコンポーネント
LiDARナビゲーションシステムは、周囲の環境を正確に感知し解釈するために、4つの不可欠なハードウェアコンポーネントを必要とします。これらのコンポーネントは、ロボットナビゲーションや自律システムのための正確な空間マップを作成するのに役立つ特殊な機能を持っています。
レーザー発振器と受光器技術仕様
レーザー光源は、すべてのLiDARシステムの中核に位置し、環境をマッピングするためのエネルギーパルスを生成します。ほとんどの地上型LiDARシステムは960-1550nmの近赤外線波長を使用し、水中型システムは水を透過するために可視光532nmの光源を必要とする。
受信機サブシステムには、光子を電流に変える検出器が含まれている。今日のLiDARナビゲーションシステムは、主に3つの検出器技術を使用している:
- アバランシェフォトダイオード(APD):ブレークダウン電圧以下ではリニアモードで動作し、標準的な検出を行います。
- 単一光子アバランシェ・ダイオード(SPAD):ブレークダウン電圧以上のガイガーモードで動作し、個々の光子を極めて高い感度で検出します。
- シリコンフォトマルチプライヤー(SiPM):複数のSPADを並列に接続し、総光子数を検出する。
検出器の感度はS/N比と最大航続距離に関係する。システムは、航行障害物までの距離を決定するために、高感度光子検出と対になった正確なタイミング電子機器を必要とします。
スキャンメカニズム:メカニカルLiDARとソリッドステートLiDARの比較
メカニカルLiDARシステムは、回転ミラーやアセンブリ全体のような可動部品を使用して周囲をスキャンします。このような可動部品により、水平方向に最大360°の広範でダイナミックなスキャンが可能になり、広い範囲を詳細に捉えることができます。一方、ソリッドステートLiDARは電子的な方法だけでレーザービームを誘導するため、可動部品がなくなり信頼性が向上します。
主なソリッドステート技術には次のようなものがある:
- 1.MEMS(微小電気機械システム):環境をスキャンするために動く小さなミラーを使用し、自動車用アプリケーションで一般的。
- 2. OPA(光フェーズドアレイ):これは、物理的な動きを伴わずに光の位相を調整してビームを導く、真のソリッド・ステート・ソリューションである。
ハイブリッドLiDARシステムは両方の技術を組み合わせている。ハイブリッドLiDARシステムは、電子的なステアリングを使用して迅速なカバレッジを実現する一方で、機械的な要素を追加して範囲を拡大し、解像度を向上させます。ソリッドステートシステムはより信頼性が高くコンパクトですが、詳細な環境マッピングが必要な場合は、機械式LiDARの方がより優れた範囲と詳細を提供します。
リアルタイムナビゲーション用信号処理ハードウェア
信号処理アーキテクチャはLiDARナビゲーションにとって極めて重要である。最新のシステムは、CPU、システムオンチップ(SoC)、フィールドプログラマブルゲートアレイ(FPGA)を組み合わせて、飛行時間計算を処理し、点群を作成します。これらの処理サブシステムは、信号のクロストーク、飽和、ノイズフィルタリング、サンプリングレートの制限などの重要な課題に取り組んでいます。
ナビゲーション・アプリケーションでは、即時の意思決定が必要です。処理アーキテクチャは、ガウス曲線フィッティング、波形平均化、デジタル・フィルタリング、デコンボリューションを実行する高度なアルゴリズムを実行し、意味のある環境データを抽出する。自律走行車は、運用速度で安全に航行するために、この処理を迅速に行う必要がある。
電力と熱管理に関する考察
熱管理は、LiDARナビゲーション・システムにおける大きな課題である。レーザーは約10%の効率で動作し、入力エネルギーの90%は光ではなく熱に変わります。この熱負荷は、いくつかのシステム構成要素に影響を与えます:
- レーザーダイオードの性能:熱が高すぎると、波長シフト、出力低下、劣化が早くなる。
- 検出器機能:熱ノイズがS/N比と精度を低下させる
- 光学部品:温度変化がビームを歪ませ、ミスアライメントを引き起こす
優れた熱管理には、予防法と伝達法の両方が用いられる。予防は、慎重な筐体設計と材料選択に重点を置き、伝達は、熱源から外部表面への伝導経路を作る方法です。ソリッドステートLiDARシステムは、単純な強制空冷でビームスキャンを最適化することにより、最大温度上昇を約20%抑えることができます。

先進の地理空間マッピング用YellowScan Navigator LiDARシステム
SLAMアルゴリズム:LiDARナビゲーションを支える頭脳
LiDARデータを解釈するソフトウェアは、複雑な環境を移動するすべての自律型ロボットに力を与える。SLAMアルゴリズムは、機械が周囲の環境を理解し、正確な位置を知るための頭脳として機能する。
同時定位とマッピングの基礎
ロボットナビゲーションは古典的な「鶏が先か卵が先か」という問題に直面している。この課題は、自動運転車や倉庫ロボットに見られる自律型ナビゲーション・システムの基礎となっている。
SLAMには、主に2つのプロセスがある。予測ステップでは、ロボットの動きと現在位置に基づいて、次にロボットがどこに移動するかを推定する。次に補正ステップでは、近くの物体までの距離を測定するLiDARセンサーを使用して、この推測を微調整する。これらのステップを連続的に繰り返すことで、位置精度を向上させ、より良いマップを構築する。
今日のSLAMシステムは、2つの方法のいずれかで動作する。拡張カルマンフィルタやパーティクルフィルタのようなフィルタリング手法を用いて、ロボットの位置とマップの特徴を計算するもの。もう1つはグラフベースのアプローチで、ランドマークが空間上でどのように互いに関連しているかを示すネットワークを作成する。グラフ法は、複雑な環境ではより効果的に機能することが多い。
LiDAR点群からの特徴抽出
生のLiDARデータは、SLAMアルゴリズムが使用する前に処理が必要です。特徴抽出は、散乱した点群をロボットが参照点として使用できるパターンやランドマークに変える。
LiDAR SLAMは、ピクセルを分析するカメラシステムとは異なり、点群の幾何学的形状を探す。主な特徴は以下の通り:
- エッジと平面:スキャン間で安定した自然な幾何学的形状
- コーナーと明確な表面:異なるビューの位置合わせに役立つユニークなマーカー
- 地面のセグメンテーション:平地と障害物の区別
エンジニアはこれらの特徴を見つけるためにさまざまな方法を使う。単純なアプローチでは、パターンを見つけるために数学演算を使用し、領域成長では類似点をオブジェクトに結合する。RANSACのような高度な技術は、点群から平らな面を特定するのに役立ちます。
優れた特徴検出はSLAMをよりうまく機能させる。エンジニアは、明確な特徴と迅速な処理の適切なバランスを見つけなければなりません。このバランスが最も重要なのは、ロボットが安全に移動するために一瞬の更新が必要な場合です。
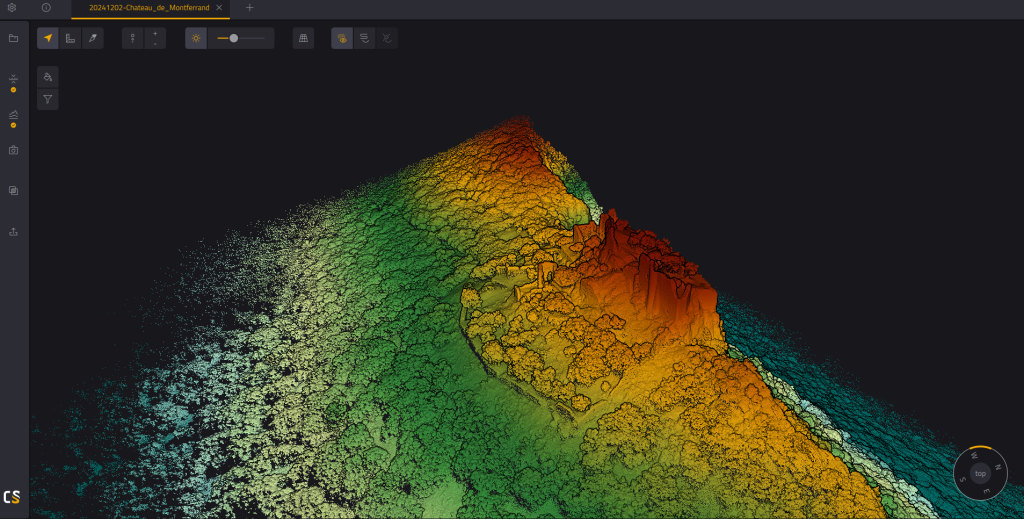
CloudStationに表示されたモンフェラン城の3D点群
ロボットナビゲーションにおけるLiDARの高度な応用
LiDARシステムは理論を超え、様々な環境での地上自律ナビゲーションを可能にするまでに成長した。この多目的なセンシング・システムは、機械が複雑な環境(交通量の多い都会の通りからGPSが使えない屋内空間まで)を驚くほど正確に見て、解釈し、指示するのに役立ちます。
自律走行知覚システム
LiDARは、厳しい条件下でも正確な環境モデリングを可能にする現代の自律走行車(AV)知覚の生命線です。今日の自動車用LiDARシステムは、歩行者、自転車、他の車両を含む複数の移動物体を一度に検出し、分類することができます。この分類は、複雑な交通シナリオにおける安全なナビゲーション判断に役立ちます。
LiDARは周囲の明るさを必要としないため、このシステムは低照度や夜間の環境で威力を発揮する。そのライブ・オブジェクト・トラッキングは、特に光量の少ない場所や悪天候のような厳しい条件下で、車両が周囲の状況をより認識できるようにします。
自動車用LiDARの統合には、物理的な配置とスマートなソフトウェアアルゴリズムの両方が必要です。これらのアルゴリズムはセンサーデータを処理し、物体検出、分類、追跡に関する有用な情報を抽出します。開発者は通常、LiDARをカメラ、レーダー、GPSと組み合わせ、個々のセンサーの限界を補う完全な知覚システムを構築する。
GPSを無視した環境における屋内ロボットのナビゲーション
LiDARベースのソリューションは、衛星ナビゲーションがうまく機能しない建物内で、移動ロボットを驚くほどの精度で位置決めすることに優れています。最新のシステムでは、3Dマップを幾何学的な基準として使用することで、2cm以内の絶対位置を正確に特定することができます。この精度は、正確なナビゲーションを必要とする倉庫、工場、その他の産業環境で非常に貴重です。
屋内LiDARナビゲーションは、現在の観測値を3D幾何学マップに並べるために登録アルゴリズムを使用します。この位置合わせは、特徴マッチングアルゴリズムと反復的最至近点(ICP)アルゴリズムによって行われる。これらの技術により、LiDAR測定値と参照マップ間のポイント間距離が短縮され、GPS信号なしで正確な測位が可能になります。
建物内のナビゲーションは困難である。というのも、システムは移動する人や家具の移動に対応しながら、広い範囲の地図を処理しなければならないからだ。優れたソリューションは、1秒間に20回以上3Dデータを処理し、頻繁に位置を更新する必要がある。
ドローンによる空中マッピングと障害物回避
ドローンに搭載されたLiDARシステムは、詳細な地形データを効率的に取得することで、地形マッピングを再構築した。先進的なシステムでは、毎秒最大100万ポイントを収集することができ、環境分析や計画に必要な高解像度のデジタル標高モデル(DEM)を作成することができる。
LiDARは自律飛行において、環境マッピングと障害物回避という2つの目的を果たす。障害物回避機能は、環境認識、アルゴリズム処理、運動制御の3つのモジュールを使用する。この複合システムにより、ドローンは衝突の可能性を発見し、自ら回避行動を取ることができる。
LiDARを搭載したドローンは、携帯電話タワーの評価、事故現場の記録、農業モニタリングのような特殊な検査に非常に有効だ。これらのプラットフォームは、人間が収集するには危険な正確な空間データを収集しながら、厳しい環境でも安全に作業することができる。
海洋および水中LiDARナビゲーション・アプリケーション
水深測定LiDARシステムは、水中環境用に特別に作られたものである。これらのシステムは、水中を透過する周波数-通常、陸上で使用される近赤外線の代わりに波長532nmの緑色光-を使用する。この特殊な光は、空中から透明な河川や浅い沿岸の水深をマッピングするため、危険を伴う水中での測量が不要になる。
水中での用途は水深測定にとどまらず、海洋生態学研究のための詳細な底生生物生息域のマッピングも含まれます。高度な水深測定システムは、水深25メートルまで、非常に鮮明に測定することができます。

賑やかな都会の通り (© Unsplash)

海洋生態学の研究(© Unsplash)
LiDARナビゲーション技術の要点
要点と今後の展望
LiDAR技術は、現代の自律航法システムの生命線である。正確な測定とスマートなデータ処理を組み合わせている。LiDARは、機械が周囲の詳細なマップを作成し、飛行時間の原理と高度なSLAMアルゴリズムによって自分の位置を知るのに役立ちます。
この汎用性の高い技術は、さまざまな分野で輝いている。自動運転車はLiDARを使って瞬時に物体を発見し、分類する。屋内ロボットは、GPSがなくても驚くべき精度で自らを誘導する。LiDARは、水中の地形をマッピングするような特殊な作業でその価値を証明しています。
新たな技術的ブレークスルーは、旧来の問題を解決するのに役立つ。ソリッド・ステート・システムは、機械式システムよりも信頼性が高い。より優れた信号処理により、機械は大気の干渉を見通すことができる。これらの改良は、あらゆるタイプのアプリケーションに対応する、より強力で効率的なナビゲーション・ツールにつながります。
LiDARナビゲーションの未来は明るい。光学フェーズドアレイやよりスマートなSLAMアルゴリズムのような新技術は、自律システムの限界を再定義します。ロボット、自動運転車、環境マッピングに携わるエンジニアや開発者は、これらの基本概念を理解する必要があります。
LiDARナビゲーションは、技術革新が実生活での利用を促進するにつれて、これまでにない速さで進化しています。より優れたハードウェアがよりスマートなアルゴリズムと組み合わさることで、地上、水中、空中での自律型ナビゲーションの新たな可能性が生まれます。
よくある質問
LiDAR技術の基本原理とは?
LiDAR技術は、飛行時間計測の原理に基づいている。レーザーパルスを照射し、光が物体から反射して戻ってくるまでの時間を測定することで、正確な距離計算と環境マッピングを可能にする。
LiDARは自律航法にどのように貢献するのか?
LiDARは、環境の詳細な3D点群を作成することにより、自律的なナビゲーションを可能にする。これらの点群はSLAMアルゴリズムを使って処理され、ロボットや車両が同時に周囲のマップを作成し、そのマップ内での位置を決定することを可能にする。
LiDARナビゲーション・システムの主なコンポーネントは?
LiDARナビゲーション・システムは、レーザー・エミッターとレシーバー、スキャニング・メカニズム(メカニカルまたはソリッド・ステート)、信号処理ハードウェア、パワー・マネージメント・システムで構成される。これらのコンポーネントは、ナビゲーションの目的で環境データを取得、処理、解釈するために連携します。
LiDARはさまざまな環境でどのように機能するのか?
LiDARは様々な環境において汎用性がある。物体検出のための自律走行車、GPSが使えない空間での屋内ナビゲーション、ドローンによる空中マッピング、さらには特殊な水深測定LiDARシステムを使った水中アプリケーションに優れています。
LiDAR技術の限界は?
LiDARは非常に効果的ではあるが、いくつかの制限がある。水面やアスファルトのような特定の表面では信号が吸収されることがあり、濃霧や雲に覆われたような悪天候では性能が低下することがある。さらに、高品質なLiDARシステムのコストは、アプリケーションによっては制約となる場合があります。