LiDAR for Cars: Understanding the Core Technology

Light Detection and Ranging (LiDAR) technology powers the “eyes” of autonomous vehicles. LiDAR principle is pretty easy to understand: the system measures how long it takes for laser pulses to bounce off objects and return to the sensor. This simple concept creates detailed 3D maps with exceptional precision – about 0.1 degrees of spatial resolution.
LiDAR systems integrate 4 main components whether they are mounted on automotive vehicles, aircraft or UAV:
- Laser transmitter: Sends out infrared light pulses at specific wavelengths (850nm, 905nm, or 1550nm)
- Photodetector receiver: Catches the reflected laser points
- Scanner: Groups laser points into “point clouds” to build 3D models
- Processing unit: Turns spatial data into precise position measurements
The LiDAR scanning process follows clear steps. First, a laser beam fires and starts a timing clock. The beam travels through optics, hits objects, bounces back through receiver optics, reaches photodetectors that convert light to electrical signals, and finally becomes digital data in point cloud form.
Two main methods dominate automotive LiDAR systems today. Direct Time-of-Flight (dToF) calculates distance by measuring light travel time. Frequency Modulated Continuous Wave (FMCW) looks at frequency differences between sent and received laser waves. FMCW adds another useful feature – it can measure velocity using the Doppler effect.
LiDAR stands out for autonomous vehicles because it “sees” everything around the car with excellent depth perception. While cameras need light to work, LiDAR functions just as well in complete darkness and tough weather. The technology can spot different objects with high accuracy – from cars and people down to small items like football helmets.
Safety requirements demand that automotive LiDAR must see 200–300 meters ahead. This range lets vehicles traveling over 60 mph react safely to obstacles. Eye safety rules also matter – IEC 60825-1 standards limit laser power, which affects what wavelengths manufacturers can use.
LiDAR Laser Pulse Generation
LiDAR systems need laser pulses to map their surroundings. You’ll learn in what follows how these pulses create the foundation for precise 3D mapping in automotive applications.
Understanding Laser Generation in Automotive LiDAR
LiDAR starts with a laser source inside the unit. This source creates short light pulses lasting just nanoseconds to microseconds. Before reaching the environment, these pulses pass through beam controllers and optical systems.
Two main methods generate these laser pulses:
- Pulsed Time-of-Flight (ToF): Sends out separate light pulses at specific times
- Frequency Modulated Continuous Wave (FMCW): Creates a steady beam with changing frequency patterns
LiDAR systems use three types of laser sources, each with unique benefits:
- Edge-Emitting Lasers (EEL): Popular in 905nm systems, offering good value but less stable spectrally
- Vertical-Cavity Surface-Emitting Lasers (VCSEL): Better temperature stability (0.06 nm·K⁻¹ vs 0.25 nm·K⁻¹ for EELs)
- Fiber Lasers: Used in 1550nm systems, highest beam quality but costs more
Choosing Between 850nm, 905nm, and 1550nm
| Wavelength | Eye Safety | Range Capability | Cost Factors | Weather Performance |
|---|---|---|---|---|
| 850nm | Limited | Moderate | Lower | Balanced |
| 905nm | Limited | Up to ~200m | Lower | Better in rain/snow |
| 1550nm | Higher | Up to ~350m | Higher | Better in fog |
Eye safety creates the biggest difference between wavelengths. Light between 400–1400nm can reach the retina and cause damage. However, wavelengths above 1400nm stop at the eye’s surface, making them safer. This safety advantage lets 1550nm lasers use 40 times more power than 905nm versions.
Pulse Rates and Energy: Finding the Right Balance
Modern LiDAR systems fire pulses at rates from 50kHz to 2MHz. Higher rates create denser point clouds, showing more detail in the 3D map.
Eye safety rules set strict limits on pulse energy. The IEC 60825-1 standard requires automotive LiDAR to meet Class 1 safety levels. This limits 905nm systems to about 100 meters range.
Pulse width matters too. Shorter pulses could give better resolution but create more noise. Most systems use pulses several hundred picoseconds long to balance these factors.

Autonomous car testing with four 360° LiDAR scanners (© Unsplash)
Understanding LiDAR’s Return Signal Detection
LiDAR systems must catch and process laser pulses after they bounce off objects. You’ll learn in what follows how these faint light signals become useful electrical data for 3D mapping.
LiDAR Photodetector Types and Their Functions
LiDAR receivers use special light-sensing devices called photodetectors. These convert incoming light into electrical signals that computers can understand. Three main types work in modern automotive LiDAR:
Avalanche Photodiodes (APDs) turn light into electrical current using two effects:
- Photoelectric effect catches the light
- Internal multiplication amplifies the signal
Silicon APDs work well with near-infrared light and cost less while InGaAs APDs catch longer wavelengths (1550nm) but cost more.
Single-Photon Avalanche Diodes (SPADs) work differently:
- Use “Geiger-mode” with high reverse voltage
- Can detect single photons
- Measure time very precisely (picoseconds)
- Need 400ns to 1μs “rest time” between measurements
Silicon Photomultipliers (SiPMs) offer the newest solution:
- Replace older APDs for 905nm light
- Contain many tiny SPAD cells
- Provide excellent signal amplification
- Count exact photon numbers
Some systems need special InP/InGaAs detectors for longer wavelengths. These must stay very cold (below −60°C) and produce more unwanted signals.
Making Weak Signals Usable
The light signals reaching photodetectors start very weak. Transimpedance amplifiers (TIAs) solve this problem by turning tiny light currents into measurable voltages.
Today’s TIAs achieve impressive performance:
- Noise levels down to 0.2 fA/√Hz
- Gain up to 10^13 V/A
Modern TIAs pack several helpful features:
- Light filtering circuits remove unwanted ambient light
- Protection systems handle signal overload
- Channel switches reduce needed components
Managing noise presents the biggest challenge. Three main approaches help get clearer signals:
- Using stronger laser pulses
- Making detectors more sensitive
- Filtering out noise
Advanced filters use statistics and smart algorithms that adapt to changing conditions. These must work instantly for automotive LiDAR despite needing complex calculations.

LiDAR-generated 3D environment map from an autonomous vehicle, detecting objects in real time
Time-of-Flight Measurement: How LiDAR Calculates Distance
LiDAR principle is pretty easy to understand: measure distances using reflected light signals. Two main methods handle this task, each working differently and offering unique benefits.
Direct Time-of-Flight (dToF) Methods
dToF measures the exact time between sending a laser pulse and catching its return. The math looks simple: distance equals half the round-trip time multiplied by light speed. But timing must be perfect – just 1 nanosecond off means a 15-centimeter error in distance.
Today’s automotive dToF systems work in two ways:
- Single-shot mode: Fires one pulse, measures its return time
- Multi-shot mode: Creates timing patterns from many pulses to get clearer signals
The systems use either time-to-digital converters (TDCs) or analog-to-digital converters (ADCs) to process signals. ADC systems cost more but work better because they can run advanced detection methods beyond simple timing.
Understanding FMCW LiDAR
FMCW offers a different approach gaining popularity in cars. Instead of separate pulses, it sends out continuous laser waves that change frequency in a pattern (called chirped light). The frequency difference between sent and returned light – the beat frequency – tells us the target’s distance.
FMCW brings several advantages:
- Measures both distance and speed at once using Doppler effect
- Uses less power than dToF for the same range
- Works better when multiple LiDARs operate nearby
- Performs well in tough conditions
How Weather Affects LiDAR Accuracy
Weather can really impact how well LiDAR works. Rain creates two problems:
- Raindrops reflect pulses before they reach targets
- Distance measurements get wrong when hitting raindrops
Fog causes the biggest headaches for LiDAR. Water molecules in fog scatter light everywhere, making it hard to tell real objects from water droplets. Performance gets worse as fog thickens – sensing starts failing at 10mm/h rainfall and stops working at 50mm/h.
Snow causes similar issues by reflecting and scattering light. Even on clear days, bright sunlight can trick the system into seeing things that aren’t there.
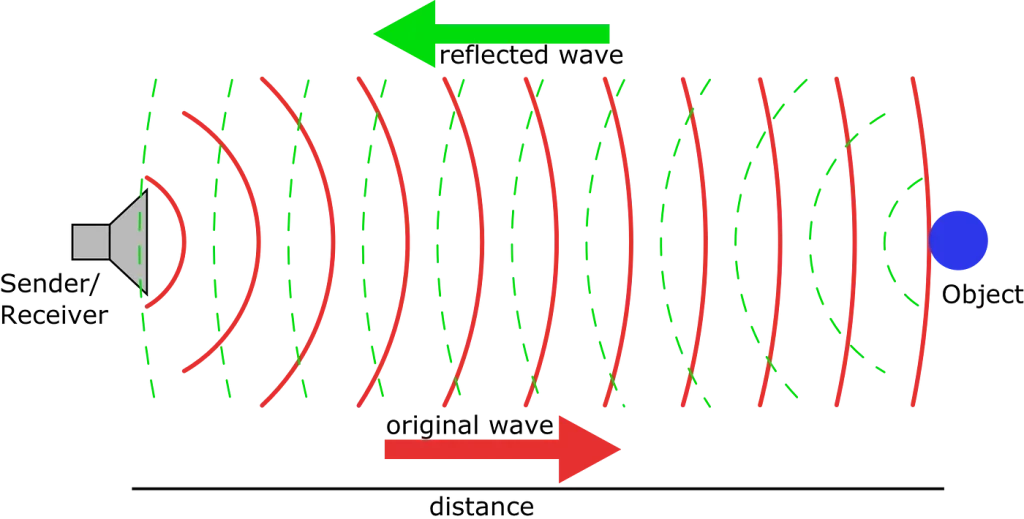
Basic principle of distance measurement using wave reflection
Creating 3D Point Clouds from LiDAR Data
LiDAR scanners capture 3D point clouds. But how do these distance measurements become useful 3D models? This section explains how raw data transforms into detailed maps that help vehicles navigate.
Building Point Clouds Step by Step
LiDAR systems collect two main pieces of information:
- How far light traveled
- How strong the returned signal was
This data becomes a 3D point cloud – a detailed map of everything around the sensor.
Different algorithms handle specific tasks in point cloud generation:
- Filtering algorithms clean up messy data
- Segmentation algorithms group similar points together
- Ground detection helps spot important features
For cars, clustering algorithms prove especially useful. The Real-time Point Cloud Clustering algorithm (RTPCC-RL) sorts points by distance to work faster. This method processes data in just 100 milliseconds while staying accurate.
Understanding Point Cloud Quality
Point density tells us how detailed our 3D map is. We measure it in points per square meter (ppsm). Different jobs need different densities:
- Parking lots: 2-4 ppsm works fine
- Identifying vehicles: needs 8-16 ppsm
- Tree studies: up to 50 ppsm for first returns, reaching 200 ppsm total
Spatial resolution depends mainly on two things:
- How wide each laser pulse spreads (IFOV)
- How far away objects are
Better LiDAR systems handle this cleverly. Some use variable resolution – very precise (0.07°) in the middle while seeing 28° total around them.
Making It Work in Real Time
Car LiDAR faces a tough challenge: processing huge amounts of data instantly. Each scan creates millions of points that need quick handling. This gets tricky with limited computer power in cars.
Speed matters as much as accuracy. While some methods like histogram processing work well, they need lots of computing power. Three main approaches help solve this:
- 1. Better data transfer systems
- 2. Special data compression
- 3. Grid-based point organization
These help meet the biggest challenge: cars must understand their surroundings within milliseconds to drive safely. Today’s systems keep getting better at this quick processing, enabling features from crash prevention to road sign reading.

Urban street captured as a 3D LiDAR point cloud with a planned navigation path
LiDAR Technology: What Comes Next
LiDAR technology keeps getting smaller, cheaper, and better. Market numbers tell the story: automotive LiDAR sales should jump from USD 538 million in 2023 to USD 3632 million by 2029, growing 38% each year.
Solid-state LiDAR leads the way forward. Right now, hybrid systems with rotating mirrors make up 66% of expected 2024 sales, while MEMS-based systems account for 32%. Looking ahead, fully solid-state LiDAR – especially flash LiDAR – should grab 37% of the market. These systems work better, need less maintenance, and cost less to make.
LiDAR principle is pretty easy to understand, but making it affordable presents challenges. Today’s long-range systems cost about USD 500. For widespread use, prices need to drop below USD 300 for long-range and USD 100 for shortrange units. Some Chinese manufacturers already offer systems under $500.
Near-infrared (NIR) technology dominates current LiDAR:
- 905/940nm wavelengths power 90% of car LiDAR systems expected in 2024
- This split between NIR and short-wave infrared should stay steady for years
New ideas keep emerging. One uses sound waves instead of mechanical parts to steer laser beams. This could shrink LiDAR systems from coffee cup to matchbox size.
FMCW LiDAR shows promise for better range and speed detection, but don’t expect to see it in cars before 2027-2028.
Beyond better hardware, LiDAR systems will work with:
- 5G networks
- Artificial intelligence
- Real-time mapping tools
These advances will help self-driving cars work better and create new uses in farming, shipping, and medical scanning.
Frequently Asked Questions
How does LiDAR technology create 3D maps for autonomous vehicles?
LiDAR creates 3D maps by emitting laser pulses and measuring the time it takes for them to reflect off objects and return to the sensor. This data is then processed to generate a detailed point cloud representation of the vehicle’s surroundings, providing accurate distance and spatial information.
What are the key components of an automotive LiDAR system?
An automotive LiDAR system typically consists of four main components: a laser transmitter that emits light pulses, a photodetector receiver that captures reflected light, a scanner that clusters the received points, and a processing unit that calculates precise positions and creates 3D models.
How does LiDAR perform in different weather conditions?
LiDAR performance can be affected by adverse weather conditions. Rain and snow can reduce point cloud density and accuracy, while fog presents significant challenges by diffusing light and creating noise. However, LiDAR generally functions better than cameras in low-light conditions and can still provide valuable data in many challenging environments.
What advancements are being made in LiDAR technology for cars?
Future LiDAR technology is focusing on solid-state systems without moving parts, which offer increased reliability and lower costs. Other advancements include the development of FMCW (Frequency Modulated Continuous Wave) LiDAR for simultaneous distance and velocity measurements, and the integration of LiDAR with AI and 5G networks for enhanced capabilities.
How does LiDAR compare to other sensing technologies used in autonomous vehicles?
LiDAR offers superior spatial resolution and depth perception compared to traditional sensing methods. Unlike cameras that rely on visible light, LiDAR can function effectively in darkness and challenging weather conditions. It can also differentiate between various object types with high precision, making it a crucial technology for autonomous vehicle navigation and obstacle detection.